B-CUBE.RC - Build Your Drone From here - Соберите свой дрон здесь!
RPi PilotPi Shield Flight Control PX4 Прошивка Датчик и Питание С Raspberry Pi OS M8N GPS 32 Бит Автопилот Коптер Самолет
RPi PilotPi Shield Flight Control PX4 Прошивка Датчик и Питание С Raspberry Pi OS M8N GPS 32 Бит Автопилот Коптер Самолет
Не удалось загрузить сведения о доступности самовывоза
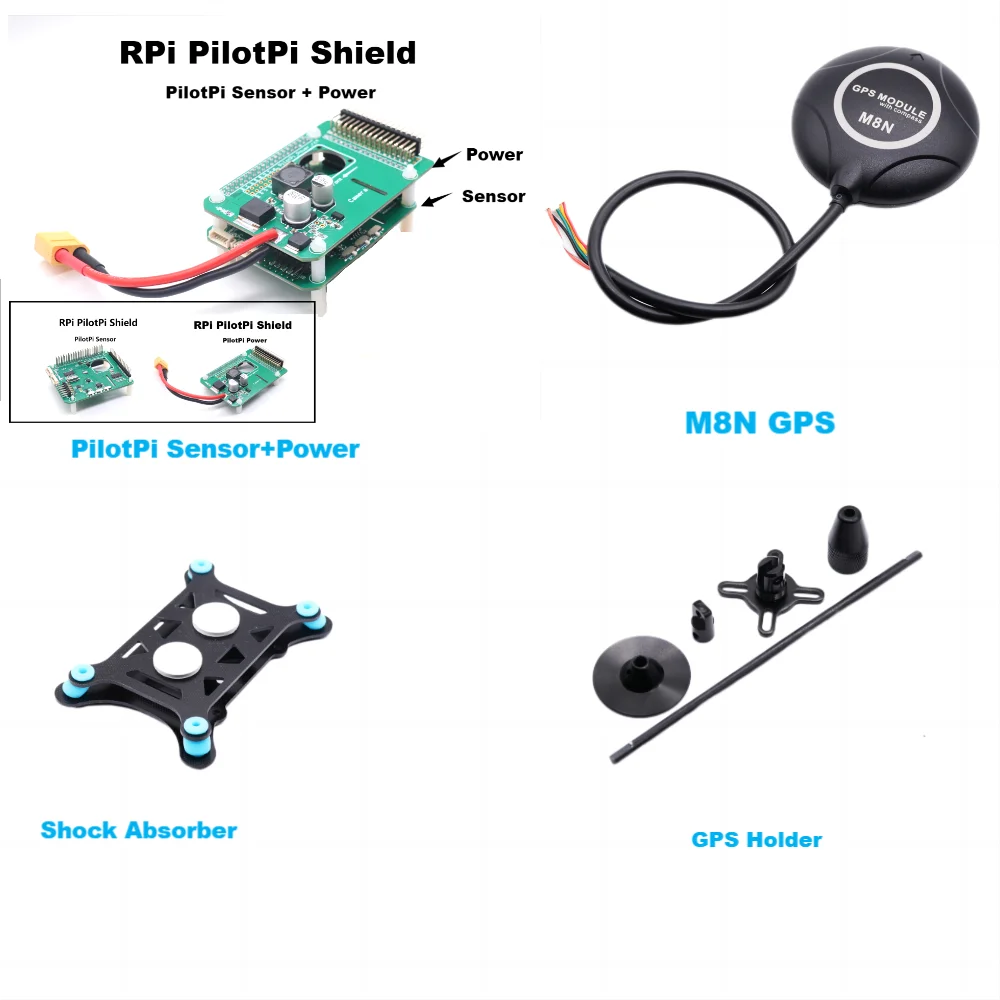
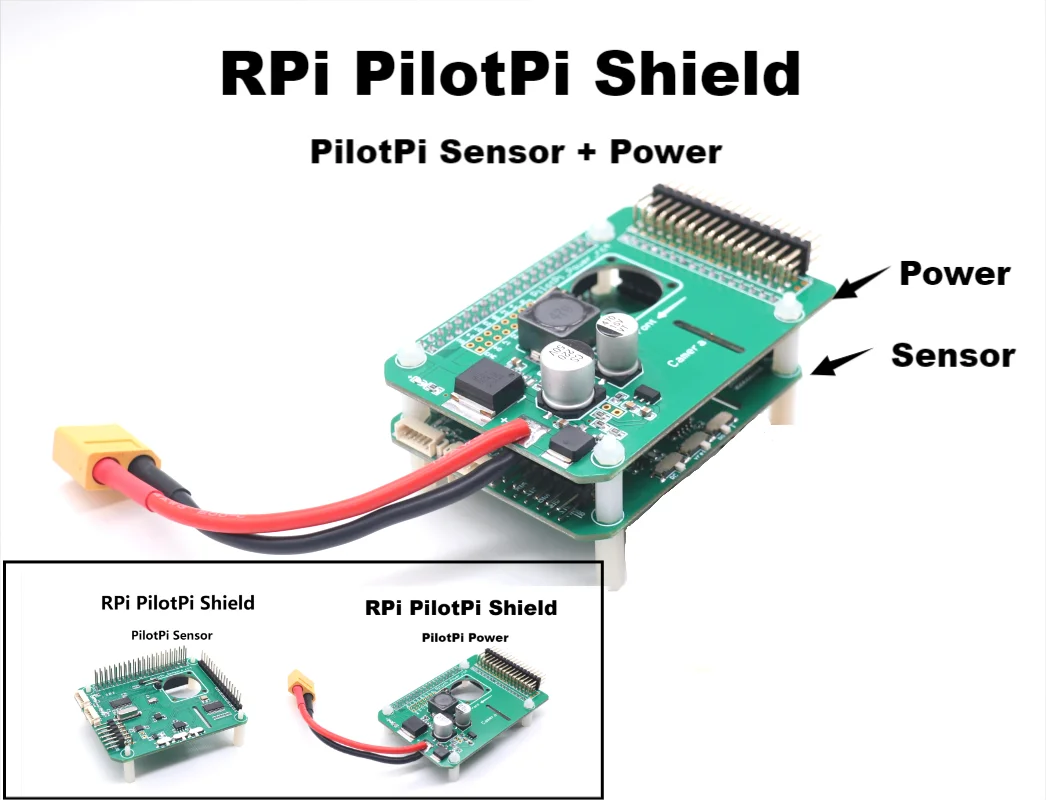
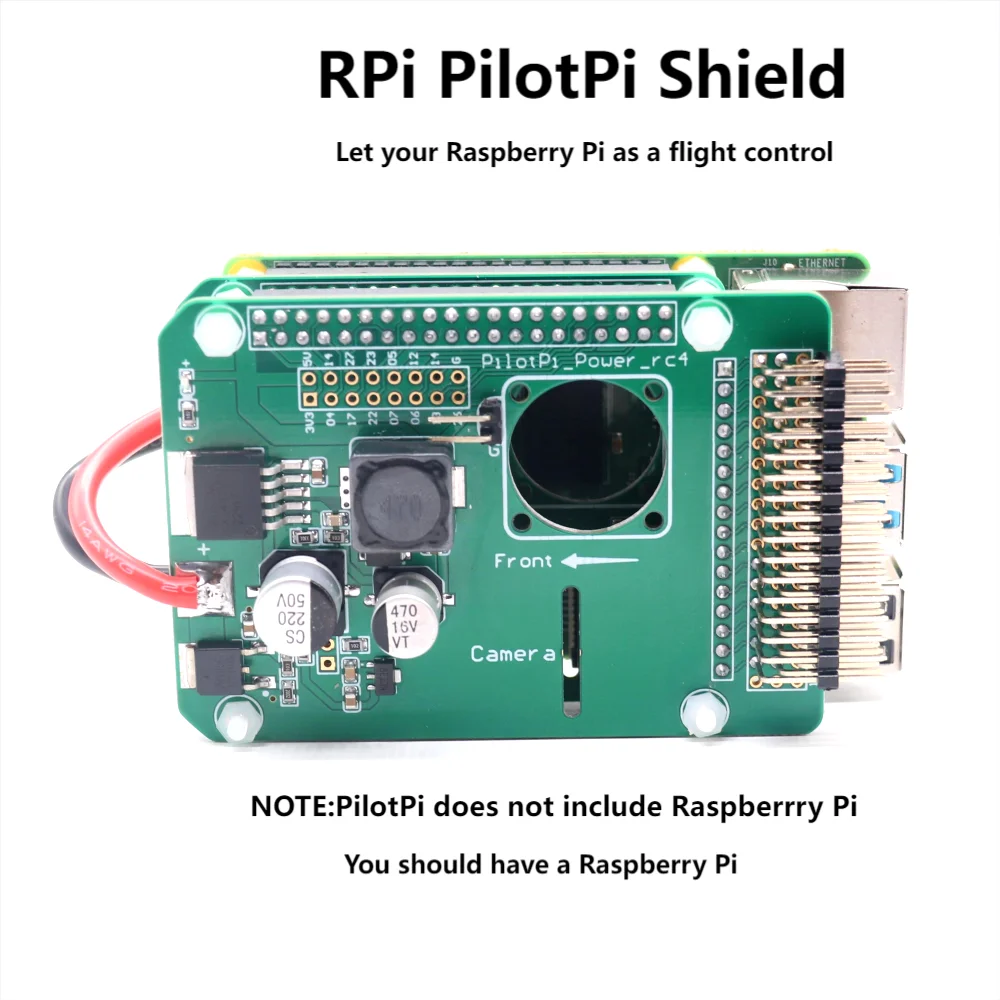
RPi PilotPi Shield
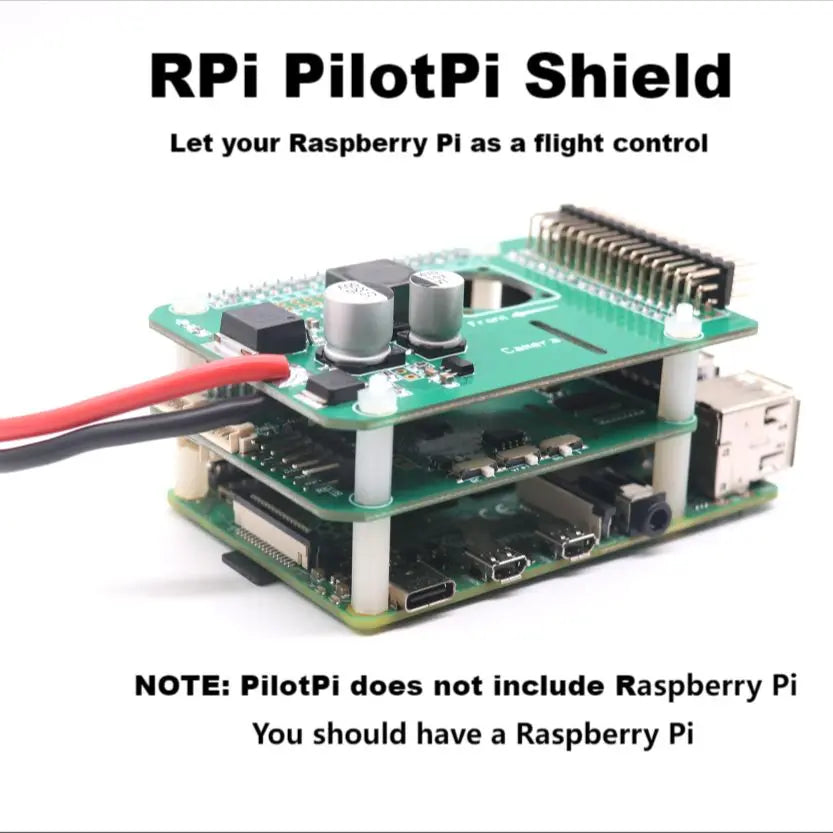
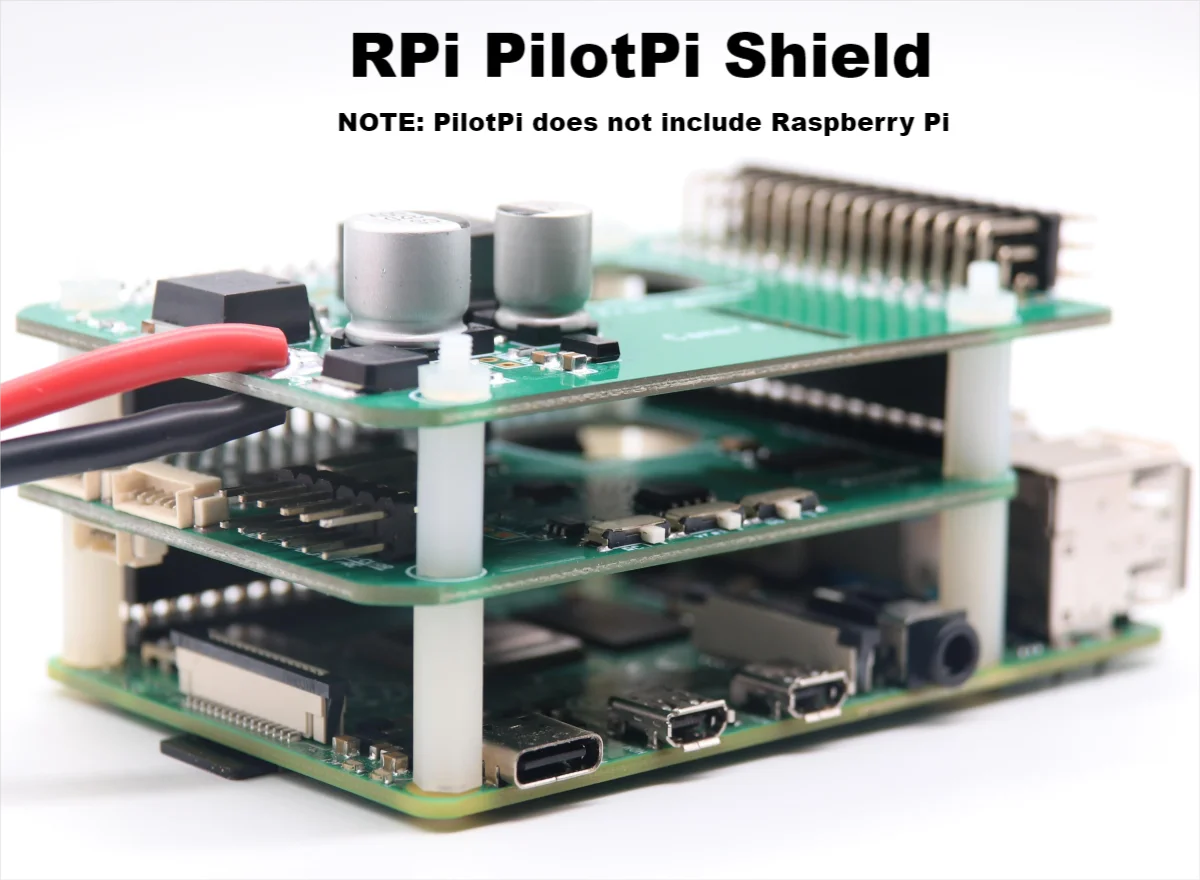
Примечание: у вас должен быть Raspberry Pi, в комплект поставки Raspberry Pi не входит. Рекомендуется 3B+/4B. Убедитесь, что у вас есть опыт использования Raspberry Pi и достаточно терпения для обучения.

Использовать Raspberry Pi в качестве пульта управления полетом — очень интересная вещь.
PilotPi shield — это полностью функциональное решение для запуска автопилота PX4 непосредственно на Raspberry Pi. Он разработан как недорогая, но высокомасштабируемая платформа с постоянными обновлениями как со стороны Linux, так и со стороны PX4. Не требуется никаких фирменных драйверов, поскольку все компоненты имеют поддержку со стороны RPi и сообщества PX4. Печатная плата и схема также имеют открытый исходный код.
#Краткое резюме
Поддерживаемые платы RPi:
Raspberry Pi 2B/3B/3B+/4B
Поддерживаемые ОС:
ОС Raspberry Pi
Сервер Ubuntu (armhf/arm64)
Акселерометр/Гироскоп:
ICM42688P
Магнитометр:
ИСТ8310
Барометр:
MS5611
ШИМ:
PCA9685
АЦП:
ADS1115
Мощность:
Аккумулятор 3~6S со встроенным датчиком напряжения.
Питание Pi через USB-кабель
Доступность: готовится к отправке
#Связь
Щит обеспечивает:
16x выходных каналов ШИМ
GPS-разъем
Телеметрический разъем
Внешний разъем шины I2C (Примечание: конфликтует с камерой CSI)
Входной порт RC (SBUS)
3 канала АЦП, диапазон 0~5 В
2*8 2,54 мм неиспользуемых разъема GPIO
Прямой доступ из RPi:
4x USB-разъема
Разъем CSI (Примечание: конфликт с внешней шиной I2C)
и т.д.
Инструкции по RPi PilotPi Shield : https://docs.px4.io/main/en/flight_controller/raspberry_pi_pilotpi.html
Как сделать PilotPi OS : https://docs.px4.io/main/en/flight_controller/raspberry_pi_pilotpi_rpios.html
Пожалуйста, прочтите руководство выше перед покупкой. Если вы хотите создать свой собственный образ, вам нужно будет скомпилировать прошивку PX4, это будет довольно сложно. Чтобы решить эту проблему, мы создали образ, который вы можете загрузить и использовать напрямую, избавляя от хлопот по созданию образа и компиляции прошивки.
Загрузите iamge отсюда, https://drive.google.com/file/d/1JSjTjCFAQcwFuCB6hoDLmdelJ5WK9WR5/view?usp=sharing
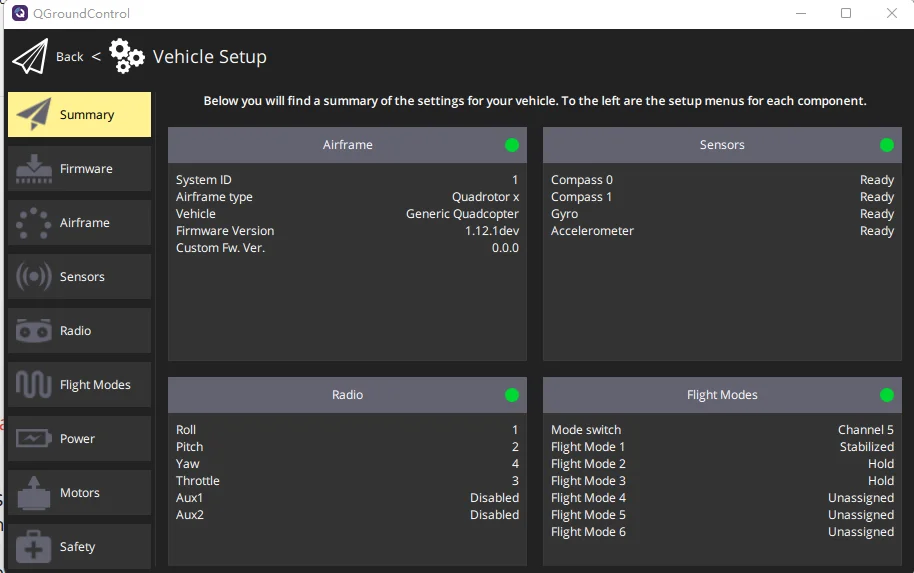
PilotPi поддерживает только прошивку PX4, для ее использования вам необходимо загрузить QgroundControl, загрузите ее отсюда, http://qgroundcontrol.com/downloads/







GPS-модуль M9N
M9N — это модуль GPS, обычно используемый в беспилотных летательных аппаратах, со следующими характеристиками и областями применения:
Высокоточное позиционирование: M9N использует передовую технологию GNSS, поддерживает несколько спутниковых навигационных систем и может предоставлять высокоточную информацию о местоположении. Для беспилотных летательных аппаратов он может достигать точного позиционирования и навигации.
Поддержка нескольких систем: M9N поддерживает несколько систем спутниковой навигации, включая GPS, ГЛОНАСС, Galileo, BeiDou и т. д. Это позволяет дронам одновременно принимать сигналы нескольких спутников, что повышает точность и надежность позиционирования.
Быстрое позиционирование: M9N имеет быстрое время холодного и горячего старта, что позволяет быстро получать спутниковые сигналы и выполнять позиционирование, что делает его критически важным для быстрого взлета и выполнения задач беспилотных летательных аппаратов.
Высокая помехозащищенность: M9N обладает превосходными помехозащищенными характеристиками, может стабильно работать в сложных электромагнитных условиях и невосприимчив к помехам от других электронных устройств.
В беспилотных летательных аппаратах M9N может использоваться в следующих целях:
Позиционирование и навигация: M9N предоставляет точную информацию о местоположении и скорости, помогая дронам осуществлять точную навигацию и управление полетом.
Навигация по точкам маршрута: вводя предварительно заданную информацию о точках маршрута в M9N, беспилотные летательные аппараты могут автоматически летать по маршруту, выполняя задачи автономной навигации по точкам маршрута.
Совместная работа нескольких дронов: несколько дронов могут использовать модуль M9N для позиционирования и синхронизации, выполняя такие задачи, как совместные полеты в группе и групповые полеты.
Возврат к возврату: M9N может предоставить точную информацию о местоположении при возврате, что позволяет дрону безопасно вернуться в точку взлета или в заданную точку возврата.
M9N может выполнять поиск большего количества спутников на открытом воздухе с более высокой точностью, более высокой скоростью поиска и лучшей стабильностью. (Конкретное количество поисков звезд определяется окружающей средой в данный момент времени.)


Загрузите изображение на TF-карту (минимум 8G), учетная запись — pi, пароль — 12345678.
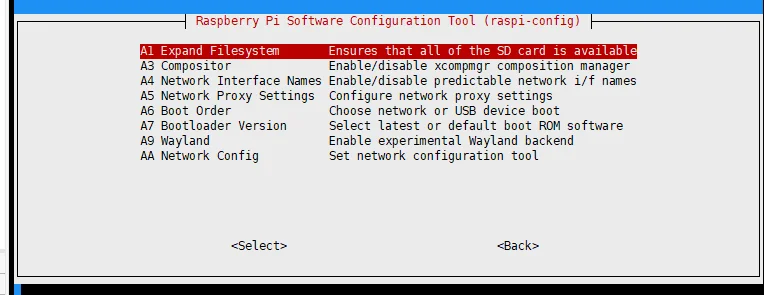
Сначала установите raspi-config. Используя эту команду,
sudo apt-get install raspi-config
затем беги sudo raspi-config . Разверните Файловую систему.
Настройте Raspberry Pi на работу в сети, подключитесь к маршрутизатору и используйте ту же локальную сеть, что и ваш компьютер.
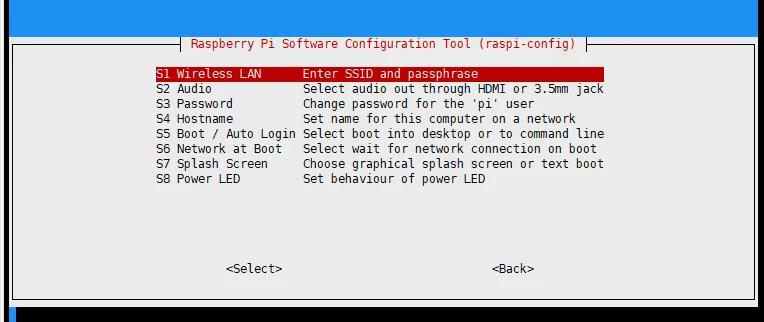
затем перезагрузите Raspberry Pi, теперь вы можете подключить PilotPi к QGC с помощью UDP.
Обратите внимание: ваш Raspberry Pi должен иметь функцию беспроводного WiFi, в противном случае для подключения вам придется использовать радиотелеметрию.
Готово, удачи!