B-CUBE.RC - Build Your Drone From here - Соберите свой дрон здесь!
B-CUBE PIXHAWK PRO Flight Control M9N Carbon Fiber 450 Frame Kit I2C PPM OLED RGB LED Ardupilot Quadcopter BLHELI 30A 2212 Motor ESC
B-CUBE PIXHAWK PRO Flight Control M9N Carbon Fiber 450 Frame Kit I2C PPM OLED RGB LED Ardupilot Quadcopter BLHELI 30A 2212 Motor ESC
Не удалось загрузить сведения о доступности самовывоза
Простой пакет:
F450 + 4 шт. BLHELI 30A + 4 пары винтов 1045 + 4 шт. двигателя 2212 920 кВ

Стандартный пакет:
F450 + 4 шт. BLHELI 30A + 4 пары винтов 1045 + 4 шт. двигателя 2212 920 кВ
ПИКСХОК PRO (белый или черный корпус) + 4G TF карта + кнопка безопасности + зуммер + PPM энкодер + плата расширения I2C + 3 линии (4 контакта 1.25, 6 контактов 1.25, 3 контакта 2.5.4) + M9N GPS + держатель GPS + модуль питания 3DR + амортизатор

Высокий пакет:
F450 + 4 шт. BLHELI 30A + 4 пары винтов 1045 + 4 шт. двигателя 2212 920 кВ
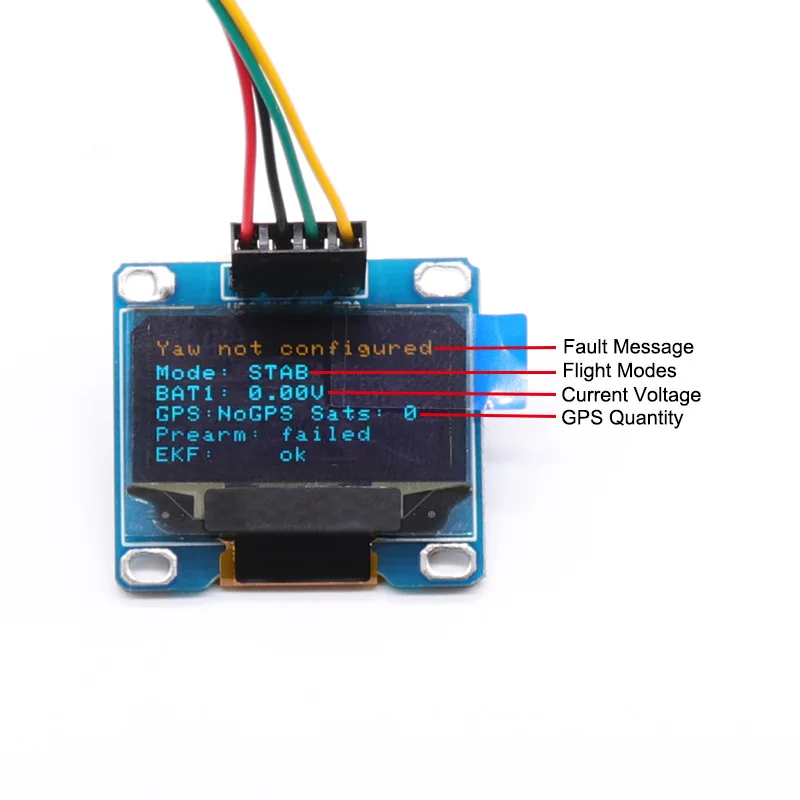
ПИКСХОК PRO (белый или черный корпус) + 4G TF карта + кнопка безопасности + зуммер + PPM энкодер + плата расширения I2C + RGB светодиод + OLED экран + 3 линии (4 контакта 1.25, 6 контактов 1.25, 3 контакта 2.5.4) + M9N GPS + держатель GPS + модуль питания 3DR + амортизатор





GPS-модуль M9N
M9N — это GPS-модуль, обычно используемый в беспилотных летательных аппаратах, со следующими характеристиками и областями применения:
Высокоточное позиционирование: M9N использует передовую технологию ГНСС, поддерживает несколько спутниковых навигационных систем и может предоставлять высокоточные данные о местоположении. Для беспилотных летательных аппаратов он обеспечивает точное позиционирование и навигацию.
Поддержка нескольких систем: M9N поддерживает несколько систем спутниковой навигации, включая GPS, ГЛОНАСС, Galileo, BeiDou и т. д. Это позволяет дронам одновременно принимать сигналы нескольких спутников, что повышает точность и надежность позиционирования.
Быстрое позиционирование: M9N отличается быстрым холодным и горячим стартом, что позволяет ему быстро получать спутниковые сигналы и выполнять позиционирование, что делает его критически важным для быстрого взлета и выполнения задач беспилотных летательных аппаратов.
Высокая помехозащищенность: M9N обладает превосходной помехозащищенностью, может стабильно работать в сложных электромагнитных условиях и невосприимчив к помехам от других электронных устройств.
В беспилотных летательных аппаратах M9N может использоваться в следующих целях:
Позиционирование и навигация: M9N предоставляет точную информацию о местоположении и скорости, помогая дронам осуществлять точную навигацию и управление полетом.
Навигация по точкам маршрута: введя в M9N информацию о предварительно заданных точках маршрута, беспилотные летательные аппараты могут автоматически выполнять задачи навигации по точкам маршрута.
Совместная работа нескольких дронов: несколько дронов могут использовать модуль M9N для позиционирования и синхронизации, выполняя такие задачи, как совместный полет в группе и групповой полет.
Возврат к возврату: M9N может предоставить точную информацию о местоположении при возврате, что позволяет дрону безопасно вернуться в точку взлета или в заданную точку возврата.
M9N может осуществлять поиск большего количества спутников на открытом воздухе с более высокой точностью, более высокой скоростью поиска и лучшей стабильностью. (Конкретное количество поисков звезд определяется окружающей средой в данный момент времени.)


Кадр 450:




 А. Особенности
А. Особенности
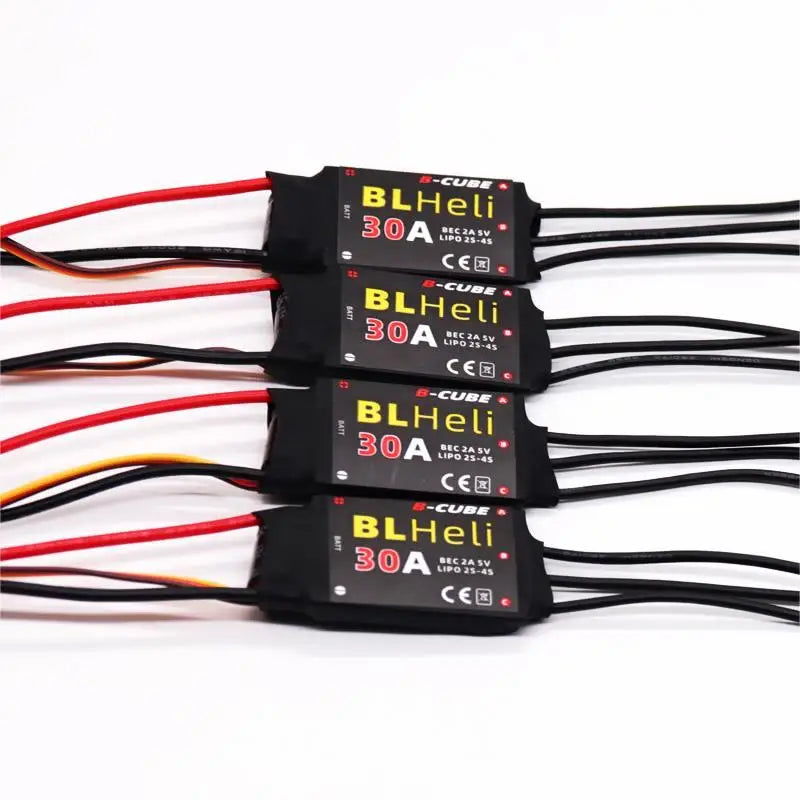
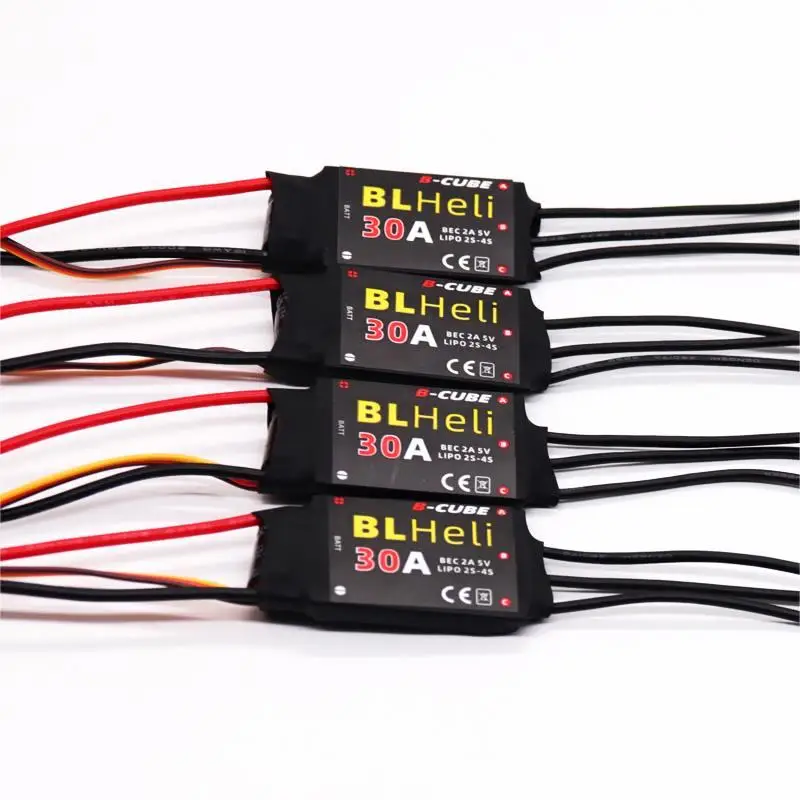
A1: Используйте оригинальные электронные компоненты, чтобы гарантировать высокое качество и повысить текущую надежность ESC.
A2: Основано на прошивке BLHeli, оптимизированной для высокой производительности с великолепной линейностью и гораздо более быстрым откликом на нажатие педали газа.
A3: Специально разработан для многороторных самолетов и совместим с самолетами и вертолетами.
A4: Множество функций защиты, включая защиту от отключения по низкому напряжению / защиту от перегрева / защиту от потери сигнала дроссельной заслонки.
A5: Диапазон газа можно настроить, он полностью совместим со всеми приёмниками, обеспечивая плавный, линейный и точный отклик. A6: Все параметры, включая настройки по умолчанию, можно запрограммировать с помощью передатчика.
B. Спецификация продукта


1045 Пропеллеры

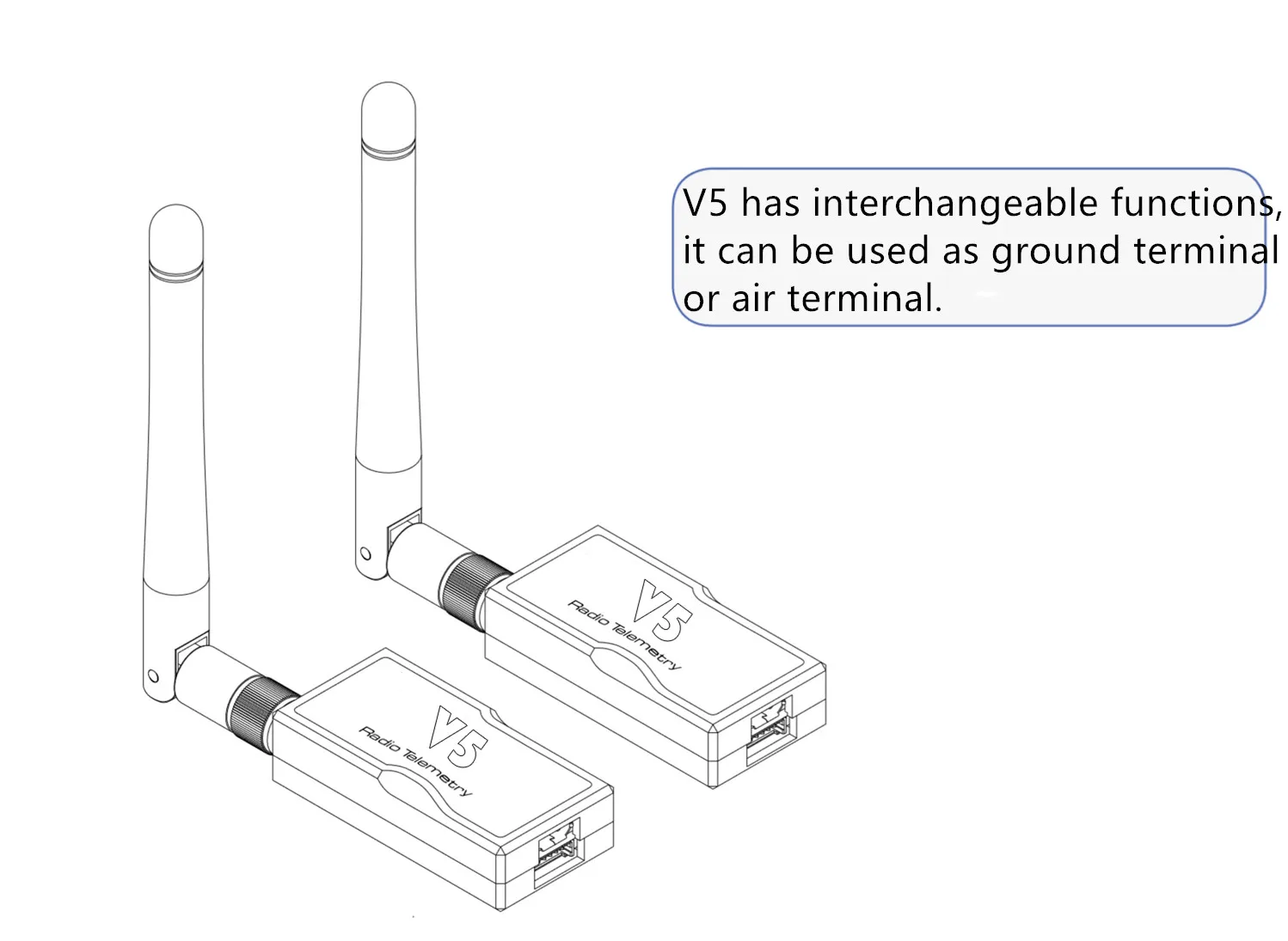
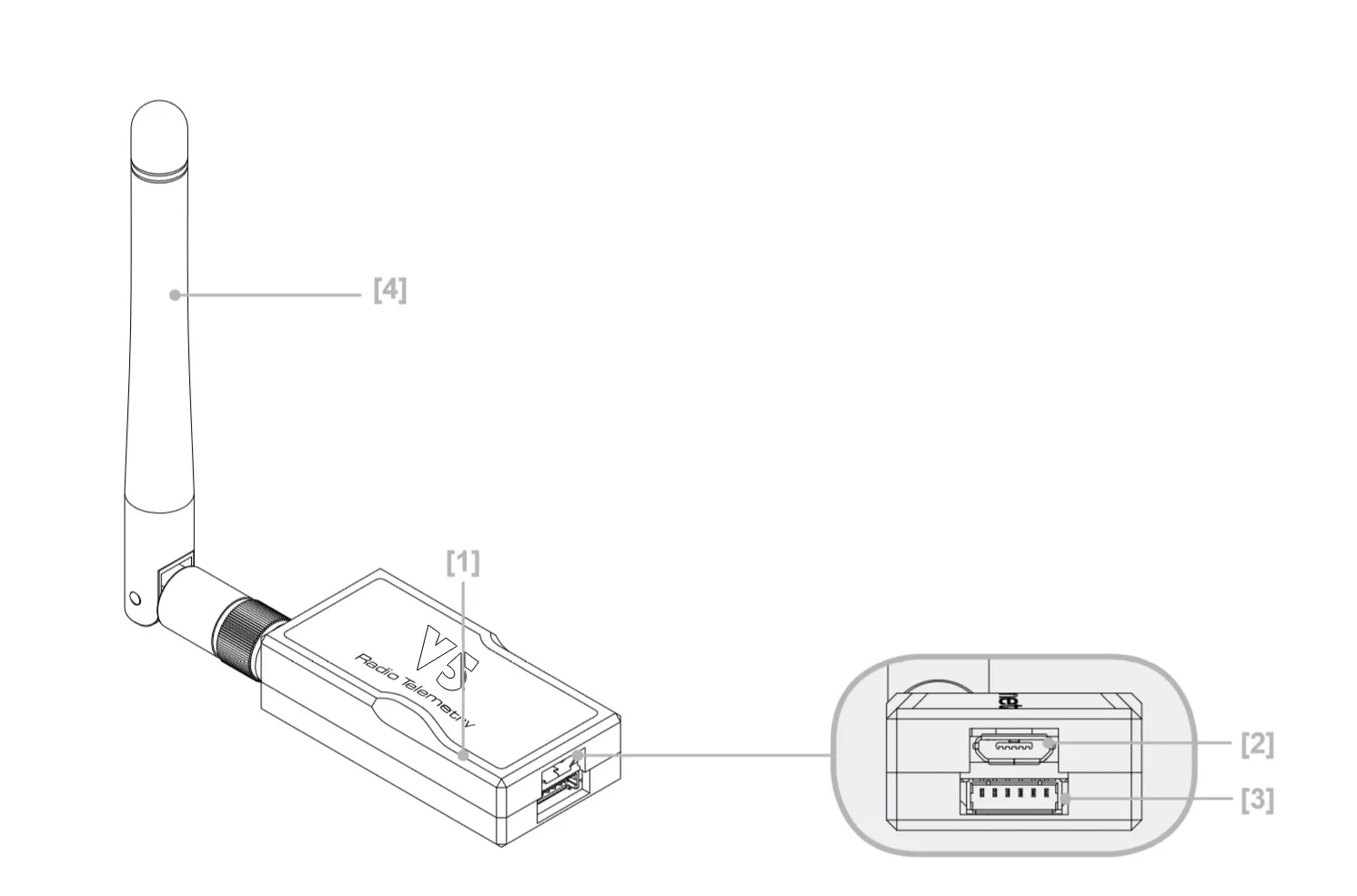
Радиотелеметрию можно использовать для беспроводной связи между pixhawk и компьютером или мобильным телефоном.
В этой статье объясняется, как подключить регуляторы скорости, двигатели и винты к автопилоту. В качестве примера взят Pixhawk, но другие автопилоты подключаются аналогичным образом.
Подключите провода питания (+), заземления (-) и сигнальные провода (s) каждого регулятора скорости к основным выходным контактам автопилота в соответствии с номером двигателя. Найдите тип рамы ниже, чтобы определить порядок подключения двигателей.

Выходные контакты Pixhawk (пронумерованы). Первые 4 контакта имеют цветовую кодировку для подключения Quadframe.
Диаграммы порядка двигателей
На схемах ниже показан порядок подключения двигателей для каждого типа рамы. Цифры указывают, какой выходной контакт автопилота должен быть подключен к каждому двигателю/винту. Направление вращения винта обозначено зелёным цветом (по часовой стрелке, CW) или синим цветом (против часовой стрелки, CCW).

Легенда для диаграмм порядка двигателя
Квадрокоптер

Распознавание пропеллеров, вращающихся по часовой стрелке и против часовой стрелки

На схемах выше показаны два типа винтов: вращающиеся по часовой стрелке (толкающие) и вращающиеся против часовой стрелки (тянущие). Наиболее надёжно определить тип винта можно по его форме, как показано ниже. Более толстая кромка — это передняя кромка, которая движется в направлении вращения. Задняя кромка имеет более радикальные зубцы и обычно тоньше.
Как установить мотор?