B-CUBE.RC - Build Your Drone From here - Соберите свой дрон здесь!
Pixracer PRO Автопилот Xracer PX4 Pixhawk Контроллер полета M8N GPS Набор RC Quadcopter Ardupilot
Pixracer PRO Автопилот Xracer PX4 Pixhawk Контроллер полета M8N GPS Набор RC Quadcopter Ardupilot
Не удалось загрузить сведения о доступности самовывоза
PIXRACER PRO
Pixracer Pro был разработан в первую очередь для удовлетворения высоких требований небольших мультикоптеров, но, конечно, его можно использовать на самолетах и других транспортных средствах, которым требуется не более 8 выходов ШИМ для управления регуляторами скорости и двигателями.




Технические характеристики
|
Технические характеристики |
mRo Pixracer Pro |
|
Главный процессор |
32-битное ядро STM32H743 Cortex M7 RISC с FPU 460 МГц |
|
Процессор ввода-вывода |
Нет |
|
БАРАН |
1024 КБ ОЗУ |
|
Вспышка |
2 МБ FRAM |
|
Крипто/хэш-процессор |
Нет |
|
Акселерометры / Гироскопы / Магниты |
Акселерометры / Гироскопы / Магниты |
|
Датчики – демпфированные |
Bosch BMI085 (6DOF) (с внутренним гашением вибраций) |
|
Датчики |
Invensense/TDK ICM-20602 (6DOF) |
|
Внутренний магнитометр |
AK09916 внутри ICM-20948 |
|
Барометр |
Барометр Infineon DPS310 (очень плавный и НЕ светочувствительный) |
|
Интерфейсы и протоколы |
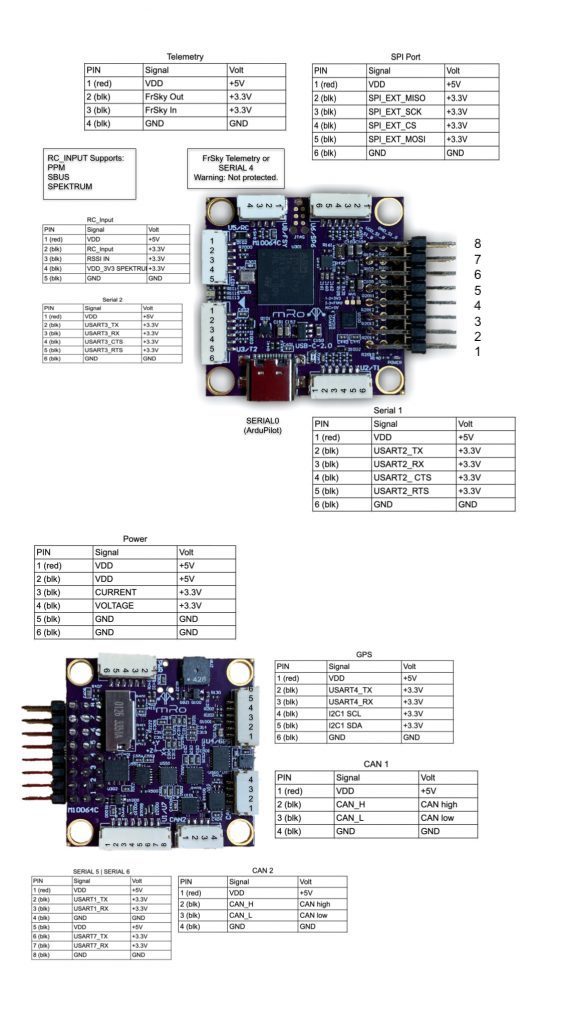
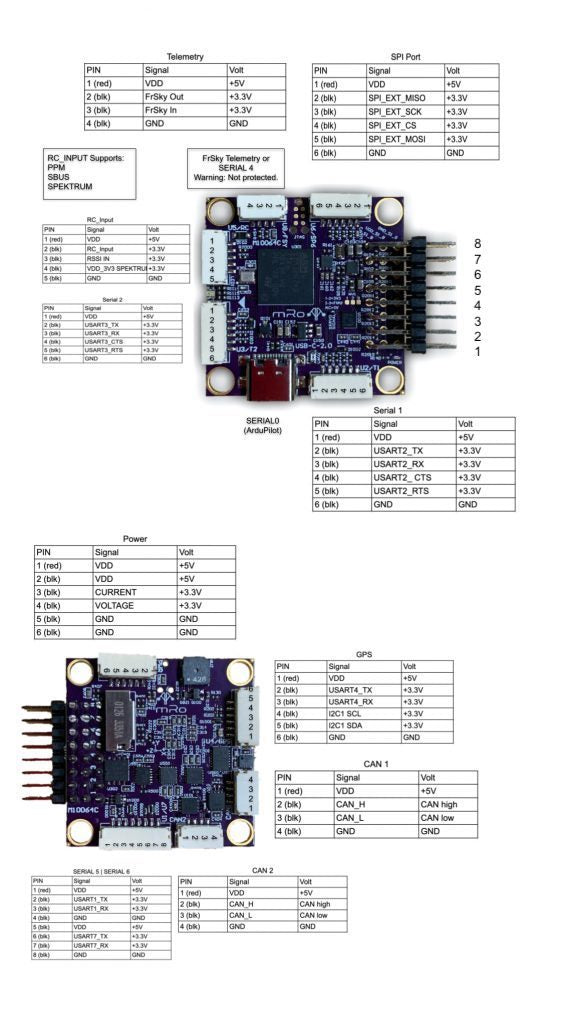
6x UART (последовательные порты) [2x с аппаратным управлением потоком, 1x FRSky Telemetry (типы D или X), 2x общего назначения и 1x GPS+I2C].
1x входной сигнал суммы PPM Поддерживаемые протоколы ввода RC: |
|
Разъемы |
– JST-GH |
|
Заголовки контактов |
Да – 8 сервоприводов |
|
Конформное покрытие |
Нет |
|
Расширенное тестирование и обкатка |
Нет |
|
Поддержка пользовательских плат-носителей |
Нет |
|
ВЕЛ |
Да (RGB) |
|
Размеры |
Ширина: 36 мм (1,42 дюйма) |
|
Масса |
9,09 г (0,31 унции) |
|
Монтажные отверстия |
Отверстия 4 мм с шагом 31,5 мм, силиконовые втулки для винтов M3 |
|
Защитный чехол |
Необязательный |
|
Типичные платформы |
-Мультиротор |
|
Совместимость |
PX4 >1.13.0, Ardupilot |
Прошивка
mRo Pixracer Pro совместим со следующими прошивками:
ArduPilot
-ArduCopter 4.x
-ArduPlane 4.x
-ArduRover 4.x
PX4
-PX4 выше v1.13.0 (только master или beta до выпуска v1.13.1)
Руководство по обычному использованию
-> BATT_VOLT_PIN= 14
-> BATT_CURR_PIN= 15
Все разъёмы соответствуют стандарту Dronecode. Все разъёмы — JST-GH. Pixracer Pro не имеет опции аварийного выключателя. Если он необходим, требуется CAN-переключатель.
Распиновка