B-CUBE.RC - Build Your Drone From here - Соберите свой дрон здесь!
PIXHAWK PRO Flight Control M10 Carbon Fiber 450 Frame Kit Ardupilot Quadcopter BLHELI 30A 2212 Motor ESC
PIXHAWK PRO Flight Control M10 Carbon Fiber 450 Frame Kit Ardupilot Quadcopter BLHELI 30A 2212 Motor ESC
Не удалось загрузить сведения о доступности самовывоза
Простой пакет:
F450 + 4 шт. BLHELI 30A + 4 пары винтов 1045 + 4 шт. двигателя 2212 920 кВ
Стандартный пакет:
F450 + 4 шт. BLHELI 30A + 4 пары винтов 1045 + 4 шт. двигателя 2212 920 кВ
ПИКСХОК PRO (белый или черный корпус) + 4G TF карта + кнопка безопасности + зуммер + PPM энкодер + плата расширения I2C + 3 линии (4 контакта 1.25, 6 контактов 1.25, 3 контакта 2.5.4) + M10 GPS + держатель GPS + модуль питания 3DR + амортизатор
Высокий пакет:
F450 + 4 шт. BLHELI 30A + 4 пары винтов 1045 + 4 шт. двигателя 2212 920 кВ
ПИКСХОК PRO (белый или черный корпус) + 4G TF карта + кнопка безопасности + зуммер + PPM энкодер + плата расширения I2C + RGB светодиод + OLED экран + 3 линии (4 контакта 1.25, 6 контактов 1.25, 3 контакта 2.5.4) + M10 GPS + держатель GPS + модуль питания 3DR + амортизатор




GPS-модуль M10 с компасом IST8310
M10 GPS для Pixhawk2.4.8: используется для Pixhawk2.4.8
M10 GPS для Pixracer R15: используется для Pixracer R15
M10 GPS для Pixhawk 6C: используется для PIXHAWK 6C
M10 GPS использует многосистемную GNSS-систему на базе u-blox M10 — GNSS-приёмника, способного принимать и отслеживать сигналы нескольких систем. Благодаря многодиапазонной архитектуре входного радиочастотного интерфейса возможен одновременный приём сигналов всех четырёх основных GNSS-созвездий: GPS, Galileo, ГЛОНАСС и BeiDou.
Он также поставляется с компасом IST8310. Этот модуль имеет скорость передачи данных 115200 бод 5 Гц.
Патч-антенна с высоким коэффициентом усиления размером 25 x 25 мм обеспечивает превосходные характеристики, а всенаправленная диаграмма направленности антенны повышает гибкость установки устройства. Она оснащена активной схемой для керамической патч-антенны и аккумулятором для резервного питания при «теплом» запуске.
Поддержка прошивок для M10 GPS:
-
Требуется PX4 1.14, ArduPilot 4.3 или более новая версия.
Спецификация
|
М10 GPS |
M9N GPS |
|
|
GNSS-приемник |
Ублокс М10 |
Ублокс М9Н |
|
Количество одновременно используемых ГНСС |
До 4 ГНСС |
До 4 ГНСС |
|
Бэйдоу |
Бэйдоу |
|
|
Галилео |
Галилео |
|
|
ГЛОНАСС |
ГЛОНАСС |
|
|
GPS |
GPS |
|
|
КЗСС |
КЗСС |
|
|
Диапазон частот |
GPS L1 |
GPS L1 |
|
Галилео E1 |
Галилео E1 |
|
|
ГЛОНАСС L1 |
ГЛОНАСС L1 |
|
|
Бэйдоу B1 |
Бэйдоу B1 |
|
|
SBAS L1 |
SBAS L1 |
|
|
КЗСС Л1 |
КЗСС Л1 |
|
|
Компас |
ИСТ8310 |
ИСТ8310 |
|
Выходной протокол |
UBX (U-blox) |
UBX (U-blox) |
|
NMEA |
NMEA |
|
|
Точность |
2,0 м КЭП |
1,5 м КЭП |
|
Частота обновления навигации |
До 25 Гц (один GNSS), |
До 25 Гц (4-канальный ГНСС) |
|
До 10 Гц (4 одновременных ГНСС) |
||
|
Система дополнения GNSS |
EGNOS, GAGAN, MSAS и WAAS |
EGNOS, GAGAN, MSAS и WAAS |
|
QZSS: L1S |
QZSS: L1S |
|
|
Скорость передачи данных по умолчанию |
115200 |
115200 |
|
Входное напряжение |
4,7-5,2 В |
4,7-5,2 В |
|
Тип порта |
JST-GH-6P |
JST-GH-6P |
|
Антенна |
Керамическая патч-антенна 25 x 25 x 4 мм |
Керамическая патч-антенна 25 x 25 x 4 мм |
|
Потребляемая мощность |
Менее 200 мА при 5 В |
Менее 200 мА при 5 В |
|
Рабочая температура |
-40~80С |
-40~80С |
|
Измерение |
φ50 x14,4 мм |
φ50 x14,4 мм |
|
Масса |
32 г |
32 г |
|
Длина кабеля |
26 см (кабель 42 см приобретается отдельно) |
26 см (кабель 42 см приобретается отдельно) |

Кадр 450:




 BLHELI ESC:
BLHELI ESC:
А. Особенности
A1: Используйте оригинальные электронные компоненты, чтобы гарантировать высокое качество и повысить текущую надежность ESC.
A2: Основано на прошивке BLHeli, оптимизированной для высокой производительности с великолепной линейностью и гораздо более быстрым откликом на нажатие педали газа.
A3: Специально разработан для многороторных самолетов и совместим с самолетами и вертолетами.
A4: Множество функций защиты, включая защиту от отключения по низкому напряжению / защиту от перегрева / защиту от потери сигнала дроссельной заслонки.
A5: Диапазон газа можно настроить, он полностью совместим со всеми приёмниками, обеспечивая плавный, линейный и точный отклик. A6: Все параметры, включая настройки по умолчанию, можно запрограммировать с помощью передатчика.
B. Спецификация продукта


1045 Пропеллеры

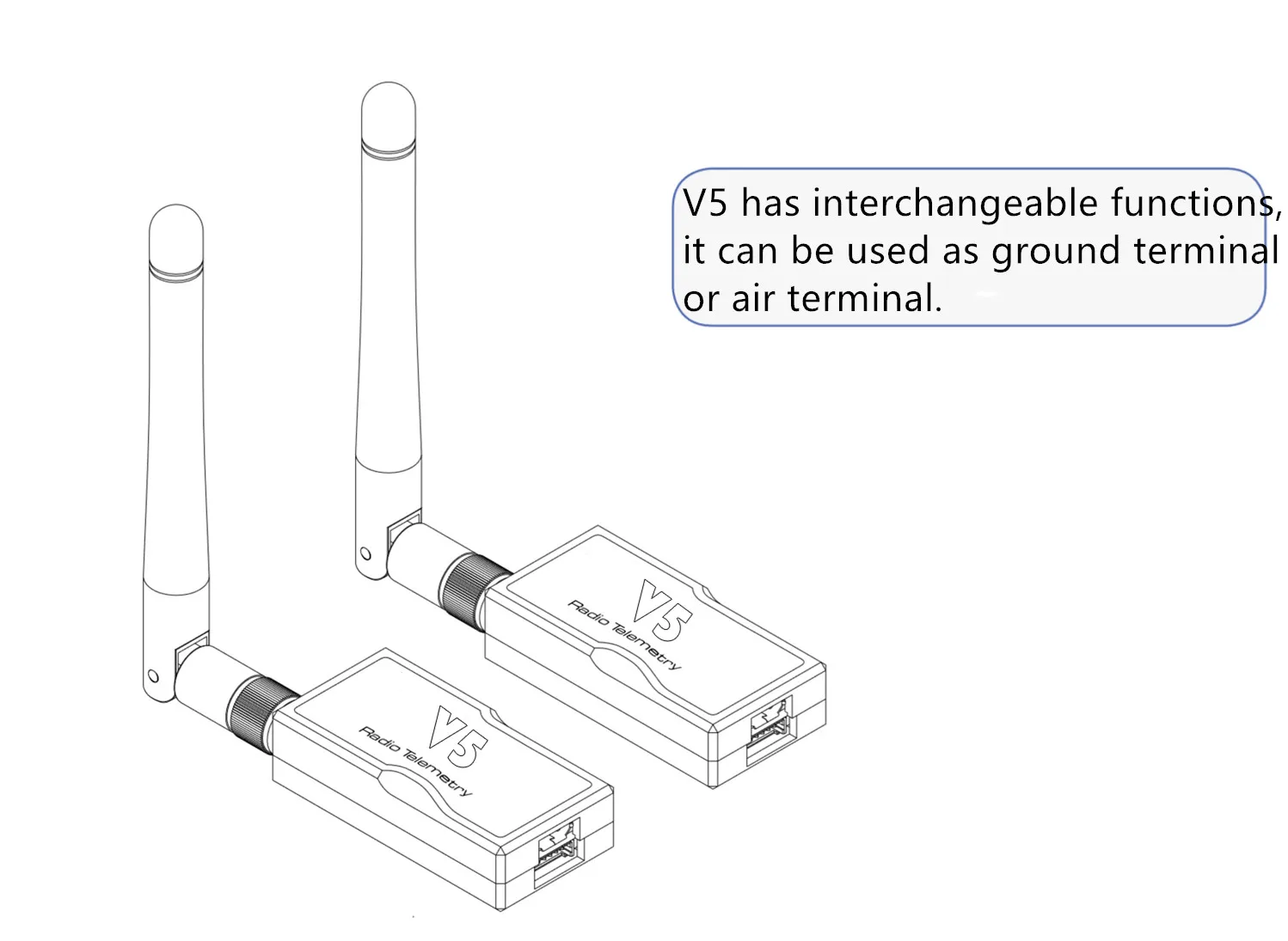
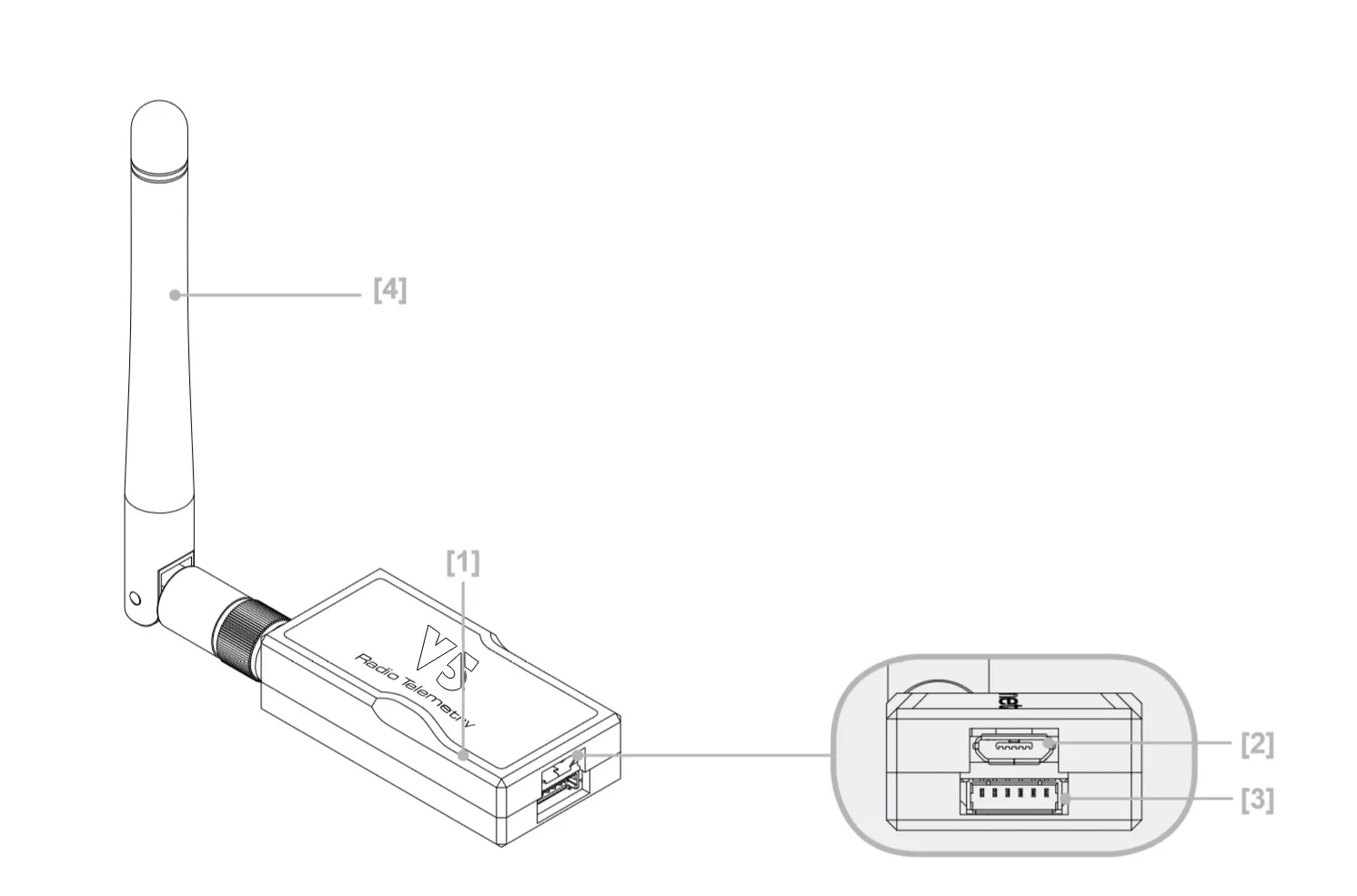
Радиотелеметрию можно использовать для беспроводной связи между pixhawk и компьютером или мобильным телефоном.
В этой статье объясняется, как подключить регуляторы скорости, двигатели и винты к автопилоту. В качестве примера взят Pixhawk, но другие автопилоты подключаются аналогичным образом.
Подключите провода питания (+), заземления (-) и сигнальные провода (s) каждого регулятора скорости к основным выходным контактам автопилота в соответствии с номером двигателя. Найдите тип рамы ниже, чтобы определить порядок подключения двигателей.

Выходные контакты Pixhawk (пронумерованы). Первые 4 контакта имеют цветовую кодировку для подключения Quadframe.
Диаграммы порядка двигателей
На схемах ниже показан порядок подключения двигателей для каждого типа рамы. Цифры указывают, какой выходной контакт автопилота должен быть подключен к каждому двигателю/винту. Направление вращения винта обозначено зелёным цветом (по часовой стрелке, CW) или синим цветом (против часовой стрелки, CCW).

Легенда для диаграмм порядка двигателя
Квадрокоптер

Распознавание пропеллеров, вращающихся по часовой стрелке и против часовой стрелки

На схемах выше показаны два типа винтов: вращающиеся по часовой стрелке (толкающие) и вращающиеся против часовой стрелки (тянущие). Наиболее надёжно определить тип винта можно по его форме, как показано ниже. Более толстая кромка — это передняя кромка, которая движется в направлении вращения. Задняя кромка имеет более радикальные зубцы и обычно тоньше.
Как установить мотор?