B-CUBE.RC - Build Your Drone From here - Соберите свой дрон здесь!
Модуль GPS M8N с компасом QMC5883 для управления полетом F4V3S PLUS QAV250 220 RC Drone FPV Racing Quadcopter Betaflight INAV
Модуль GPS M8N с компасом QMC5883 для управления полетом F4V3S PLUS QAV250 220 RC Drone FPV Racing Quadcopter Betaflight INAV
Не удалось загрузить сведения о доступности самовывоза
Ublox NEO-M8n GPS с компасом QMC5883
GPS:NEO-M8N
компас :QMC5883
Размер: 36x36мм
Монтажные отверстия: 30,5x30,5 мм
M8N GPS — это широко используемый модуль приемника GPS, производимый компанией u blox. Он использует чип u-blox M8N, который имеет высокую точность и чувствительность в позиционировании.
Модуль GPS M8N поддерживает несколько спутниковых навигаторов, включая GPS, ГЛОНАСС, Galileo и BeiDou. Он может принимать и обрабатывать спутниковые сигналы от этих навигационных систем, достигая точного получения информации о местоположении, скорости и времени.
Модуль GPS M8N обычно поставляется в виде небольшой печатной платы с последовательным портом UART и интерфейсом I2C, что облегчает связь с микроконтроллерами или другими устройствами. Он также может принимать спутниковые сигналы через внешние антенны и имеет схему управления питанием и резервную батарею для поддержания долговечности спутниковых данных и конфигурации.
Этот модуль предоставляет богатые возможности конфигурации, которые можно устанавливать и корректировать с помощью команд последовательного порта или программного обеспечения для конфигурации. Пользователи могут выбирать соответствующие режимы работы, частоты обновления, параметры навигации и т. д. в соответствии со своими потребностями.
GPS-модуль M8N широко используется в таких областях, как беспилотные летательные аппараты, отслеживание транспортных средств, навигация и авиация, обеспечивая надежные функции позиционирования и навигации.





1.Как подключиться?
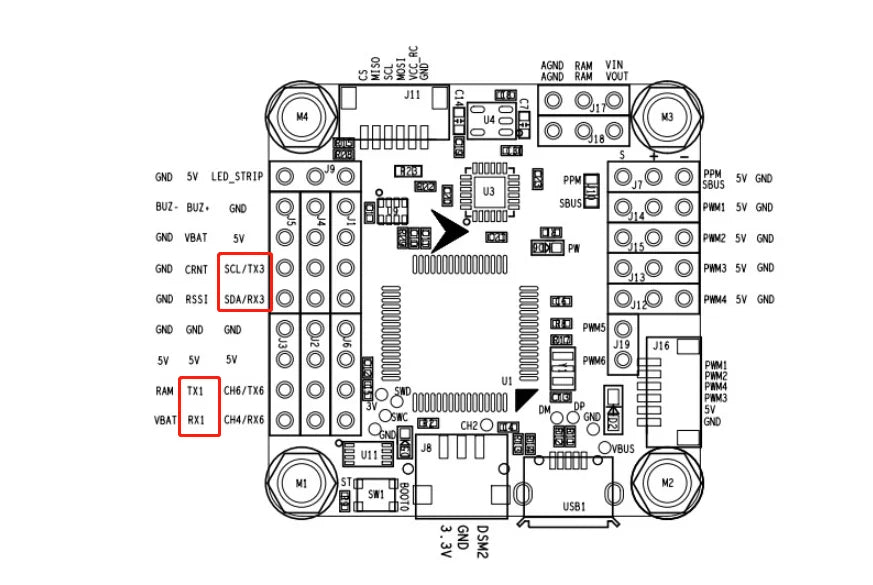
Это схема определения интерфейса F4V3S.
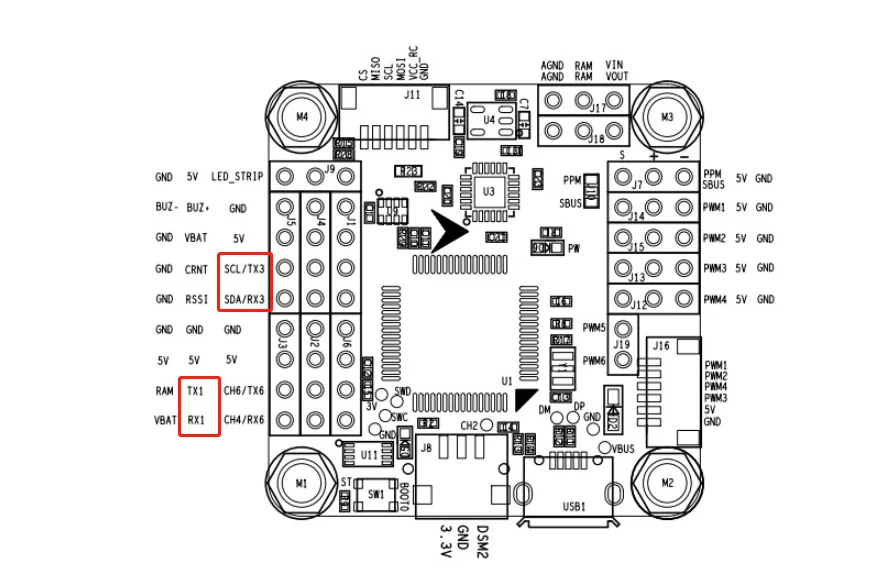

Определение линии GPS следующее:
Красный: VCC (+ 5 В)
Черный: Земля
Зеленый: TXD
Желтый: RXD
Фиолетовый: SCL
Белый: ПДД

ПРИМЕЧАНИЕ: Передатчик GPS должен быть подключен к приемнику F4V3S, приемник GPS должен быть подключен к приемнику F4V3S. Этот шаг очень важен .
2.Как настроить M8N GPS?
настройка для M8N GPS:

Затем сохраните и перезагрузите.

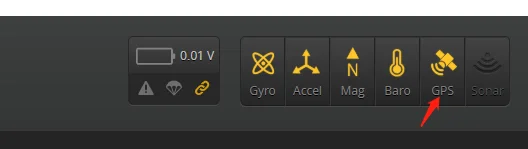
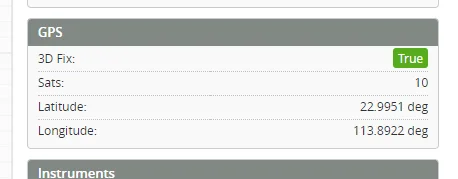
Затем сохраните и перезагрузите. Затем вы увидите, что метка GPS включена.


2.Как настроить компас QMC5883?
Примечание: если вы используете прошивку INAV, этот шаг не нужен, так как прошивка INAV может автоматически обнаружить компас. Прошивки Betaflight и cleanflight должны выполнять этот шаг.

перейти на экран CLI для ввода команды
resource I2C_SCL 2 B10
ресурс SERIAL_TX 3 нет
resource I2C_SDA 2 B11
ресурс SERIAL_RX 3 нет
установить mag_bustype = I2C
установить mag_i2c_device = 2
установить mag_i2c_address = 0
установить mag_hardware = АВТО
сохранять
Согласно вводу команды выше, нажмите клавишу ENTER на клавиатуре после каждой строки ввода команды. Не забудьте ввести команду «сохранить» в конце, иначе все команды не будут работать.
Приведенная выше команда означает отключение последовательного порта 3 и включение функции I2C, поскольку последовательный порт 3 и I2C совместно используют один интерфейс, мы должны вручную включить I2C и отключить последовательный порт 3.
Затем перезагрузите плату. Вы увидите, что метка Mag включена. Более подробную информацию вы можете прочитать здесь. https://www.rcgroups.com/forums/showthread.php?3073449-Omnibus-Nano-F4-v6/page15