B-CUBE.RC - Build Your Drone From here - Соберите свой дрон здесь!
F4V3S/F4V3S PLUS FC плата контроллера полета барометр OSD для QAV250 220 RC Drone FPV Racing Quadcopter Betaflight INAV
F4V3S/F4V3S PLUS FC плата контроллера полета барометр OSD для QAV250 220 RC Drone FPV Racing Quadcopter Betaflight INAV
Не удалось загрузить сведения о доступности самовывоза
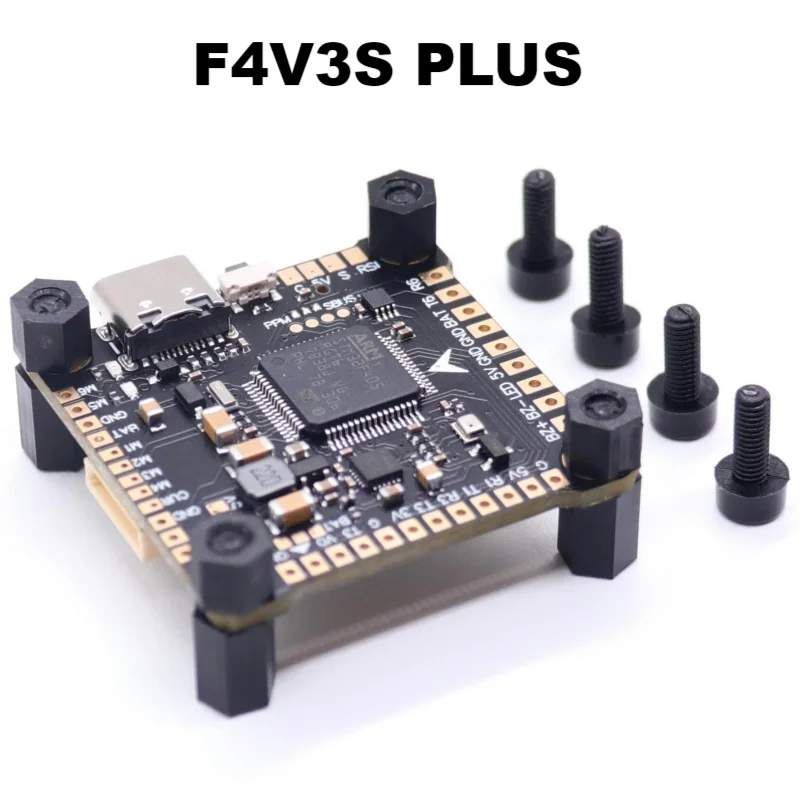
Контроллер полета F4V3S PLUS
Примечание: F4V3S PLUS использует USB-порт TYPEC. Убедитесь, что у вас есть USB-кабель TYPEC, обеспечивающий нормальную передачу данных. Некоторые USB-кабели предназначены только для зарядки и не могут передавать данные в систему управления полётом. Если используемый USB-кабель не распознаёт USB-порт системы управления полётом, это означает, что ваш USB-кабель не может нормально передавать данные. Мы загружаем прошивку в систему управления полётом через USB и проводим тестирование, поэтому можем с уверенностью гарантировать исправность USB-порта системы управления полётом.
Если вы не можете убедиться в том, что ваш USB-кабель работает правильно, приобретите его.
USB-кабель TYPEC: https://www.aliexpress.us/item/3256805282876420.html
Спецификация:
Название товара: F4V3S PLUS Flight Controller
Прошивка: OMNIBUSF4SD(AIRB)
USB-порт: TYPE-C
Размер: 36x36 мм
Монтажные отверстия: 30,5x30,5 мм
Микроконтроллер STM32 F405
Поддержка Dshot
Перетаскивание экранного меню, настроенное через Betaflight
MPU6500 6-осевой SPI-гироскоп и акселерометр
Порты SBUS/PPM и Spketrum DSMX
Черный ящик карты MicroSD
Баро (БМП280)
5V3A 9V3A BEC
Встроенные видеофильтры
Характеристики:
измерено.
Благодаря процессору F4, встроенному экранному меню Betaflight, карте памяти MicroSD Black Box, 5v3a sbec и видеофильтру вы сможете настроить PIDS с помощью передатчика и в кратчайшие сроки вывести его на трассу!
Примечание : F4V3S PLUS поддерживает прошивки cleanflight, betaflight и INAV.



Используйте UART6 для приемника дистанционного управления (PPM или SBUS)

Ublox NEO-M8n GPS с компасом QMC5883
GPS: NEO-M8N
компас :QMC5883
Размер: 36x36 мм
Монтажные отверстия: 30,5x30,5 мм
M8N GPS — это распространённый GPS-приёмник, производимый компанией U-Blox. Он использует чип U-Blox M8N, обеспечивающий высокую точность и чувствительность позиционирования.
GPS-модуль M8N поддерживает несколько систем спутниковой навигации, включая GPS, ГЛОНАСС, Galileo и BeiDou. Он может принимать и обрабатывать сигналы этих навигационных систем, обеспечивая точное определение местоположения, скорости и времени.
GPS-модуль M8N обычно поставляется в виде небольшой печатной платы с последовательным портом UART и интерфейсом I2C, что обеспечивает связь с микроконтроллерами или другими устройствами. Он также может принимать спутниковые сигналы через внешние антенны и оснащен схемой управления питанием и резервным аккумулятором для сохранения данных и конфигурации спутников.
Этот модуль предоставляет широкие возможности настройки, которые можно настраивать и изменять с помощью команд последовательного порта или программного обеспечения для конфигурирования. Пользователи могут выбирать подходящие режимы работы, частоту обновления, параметры навигации и т. д. в соответствии со своими потребностями.
GPS-модуль M8N широко используется в таких областях, как беспилотные летательные аппараты, слежение за транспортными средствами, навигация и авиация, обеспечивая надежные функции позиционирования и навигации.






1.Как подключиться?
Это схема определения интерфейса F4V3S PLUS.
Определение линии GPS следующее:
Красный: VCC (+ 5 В)
Черный: Земля
Зеленый: TXD
Желтый: RXD
Фиолетовый: SCL
Белый: ПДД

ПРИМЕЧАНИЕ: Передатчик GPS должен быть подключен к приемнику F4V3S, приемник GPS должен быть подключен к приемнику F4V3S. Этот шаг очень важен .
2.Как настроить M8N GPS?
настройка для M8N GPS:

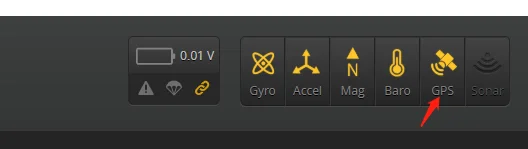
Затем сохраните и перезагрузите компьютер.

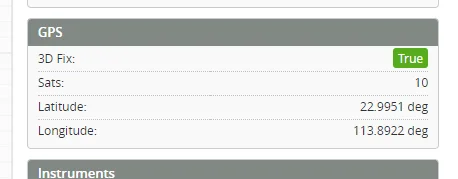
Затем сохраните и перезагрузите. После этого вы увидите, что метка GPS включится.


2.Как настроить компас QMC5883?
Примечание: если вы используете прошивку INAV, этот шаг не нужен, так как прошивка INAV автоматически определяет компас. Прошивки Betaflight и Cleanflight должны выполнять этот шаг.

перейти на экран CLI для ввода команды
resource I2C_SCL 2 B10
resource I2C_SDA 2 B11
resource SERIAL_TX 3 none
resource SERIAL_RX 3 none
set mag_bustype = I2C
set mag_i2c_device = 2
set mag_i2c_address = 0
set mag_hardware = AUTO
save
В соответствии с приведенным выше вводом команды, нажимайте клавишу ENTER на клавиатуре после каждой строки ввода. Не забудьте ввести команду «save» в конце, иначе все команды не будут работать.
Приведенная выше команда означает отключение последовательного порта 3 и включение функции I2C, поскольку последовательный порт 3 и I2C используют один интерфейс, мы должны вручную включить I2C и отключить последовательный порт 3.
Затем перезагрузите плату. Вы увидите, что метка Mag горит. Более подробную информацию вы можете прочитать здесь. https://www.rcgroups.com/forums/showthread.php?3073449-Omnibus-Nano-F4-v6/page15


Характеристики товара VTX1000:
Название товара: Видеопередатчик VTX1000 LITE FPV
Входное напряжение: 7-27 В постоянного тока
Входной ток: 3- или 4-секундная батарея, 600 мВт = 360 мА±10 мА
Выходное напряжение: 5 В постоянного тока, 1 А
Выходная мощность: переключаемая 25/100/200/400/600 мВт
Канал: 48CH
Переключение частоты: ручная кнопка/OSD (одновременная поддержка)
Разъем: MMCX
Размер: 36x36x9 мм
Монтажное отверстие: 30,5x30,5 мм, M3
Функции:
-Стабильная выходная мощность, большая дальность передачи
-Быстрый 5-ступенчатый переключатель мощности, два независимых красных индикатора, показывающих текущую выходную мощность 25/200/400/600 МВт
-Использование 4(синего)*3(зеленого) светодиодного дисплея 48 каналов
-Поддержка дистанционного управления частотой сигнала OSD, поддержка режима PIT (выходная мощность omW может быть открыта только в OSD)
-С сетевым фильтром
-Антенна с MMCX-SMA, уменьшающая пространство
-Мощный чип, входное напряжение до 27 В, выходное напряжение 5 В/1 А, низкий уровень пульсаций, меньше помех
Расстояние между монтажными отверстиями 30,5 мм*30,5 мм, подходит для полетных контроллеров CC3D, NAZE32, F3, F4, F7

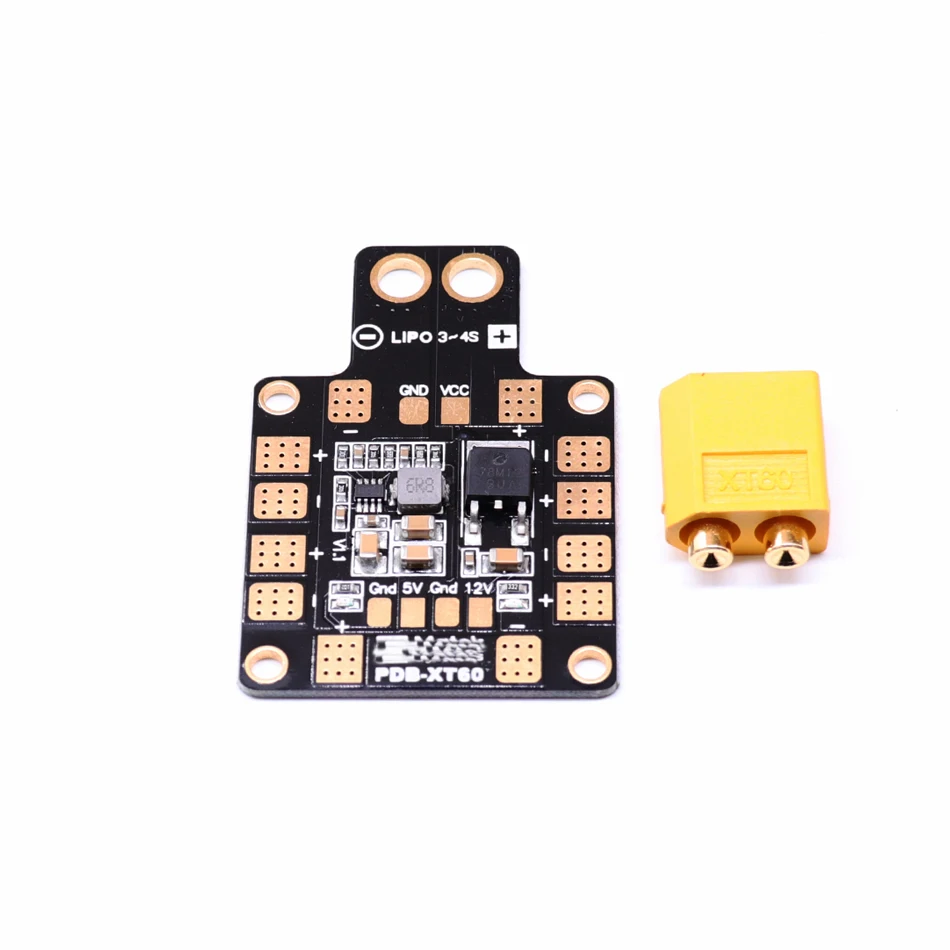
ПДБ
Сенсор: 1/2.7 800TVL CCD
Разрешение: D1 1080P
Объектив: 5 МП 2,1 мм
Видеоформаты: PAL / NTSC (внутреннее экранное меню с регулировкой)
Соотношение сигнал/шум > 60 Дб (АРУ ВЫКЛ.)
Электронный затвор: PAL: 1/50-100,000, NTSC: 1/60-100,000
Автоматическая регулировка усиления: ДА
Компенсация задней засветки: ДА
Интенсивность освещения: 0,001 Люкс / 1,2 Ф
Автоматическая регулировка усиления: регулируемая
Компенсация задней подсветки: регулируемая
Питание: постоянный ток 5–22 В
Материал корпуса: алюминиевый сплав
Размеры: 28мм * 26мм * 28мм
Вес нетто: 18 г
Особенность:
Модернизированная FPV-камера Mista 800TVL 2,1 мм с широким углом обзора HD 1080P CCD PAL/NTSC, переключаемая 16:9 OSD.

Ublox NEO-M8n GPS с компасом QMC5883
GPS: NEO-M8N
компас :QMC5883
Размер: 36x36 мм
Монтажные отверстия: 30,5x30,5 мм
M8N GPS — это распространённый GPS-приёмник, производимый компанией U-Blox. Он использует чип U-Blox M8N, обеспечивающий высокую точность и чувствительность позиционирования.
GPS-модуль M8N поддерживает несколько систем спутниковой навигации, включая GPS, ГЛОНАСС, Galileo и BeiDou. Он может принимать и обрабатывать сигналы этих навигационных систем, обеспечивая точное определение местоположения, скорости и времени.
GPS-модуль M8N обычно поставляется в виде небольшой печатной платы с последовательным портом UART и интерфейсом I2C, что обеспечивает связь с микроконтроллерами или другими устройствами. Он также может принимать спутниковые сигналы через внешние антенны и оснащен схемой управления питанием и резервным аккумулятором для сохранения данных и конфигурации спутников.
Этот модуль предоставляет широкие возможности настройки, которые можно настраивать и изменять с помощью команд последовательного порта или программного обеспечения для конфигурирования. Пользователи могут выбирать подходящие режимы работы, частоту обновления, параметры навигации и т. д. в соответствии со своими потребностями.
GPS-модуль M8N широко используется в таких областях, как беспилотные летательные аппараты, слежение за транспортными средствами, навигация и авиация, обеспечивая надежные функции позиционирования и навигации.


Контроллер полета F4V3S
Характеристики полетного контроллера F4V3S:
Название продукта: Плата контроллера полета F4
Материал: Электронный компонент
Стандартный размер платы: около 36x36 мм
Стандартный размер монтажного отверстия: 30,5x30,5 мм
Функции:
-STM32 F405 микроконтроллер
-Поддержка Dshot
- Перетаскивание экранного меню, настроенного с помощью Betaflight Configurator
- Поддержка Smartaudio v2. Настройте PID и конфигурируйте OMNIBUS FC с вашего передатчика.
-MPU6500 6-осевой SPI-гироскоп и акселерометр (отображается как MPU6500 в inav-configurator при загрузке прошивки INAV)
-Порты SBUS/PPM и Spketrum dsm-x
-черный ящик SD-карты
-Баро(БМП280)
-5В 3А СБЭК
-Встроенный видеофильтр (может подавать только 5 В на видеопередатчик и камеру)
-SmartAudio V2 через tx6 на J10
-Расположение выводов регулятора скорости 4×3
-ИК-контакты для транспондера времени прохождения круга

Материал: Электронный компонент
Стандартный размер платы: около 36x36 мм
Стандартный размер монтажного отверстия: 30,5x30,5 мм
Функции:
-STM32 F405 микроконтроллер
-Поддержка Dshot
- Перетаскивание экранного меню, настроенного с помощью Betaflight Configurator
- Поддержка Smartaudio v2. Настройте PID и конфигурируйте Omnibus FC с вашего передатчика.
-MPU6500 6-осевой SPI-гироскоп и акселерометр (отображается как MPU6500 в inav-configurator при загрузке прошивки INAV)
-Порты SBUS/PPM и Spketrum dsm-x
-черный ящик SD-карты
-Баро(БМП280)
-5В 3А СБЭК
-Встроенный видеофильтр (может подавать только 5 В на видеопередатчик и камеру)
-SmartAudio V2 через tx6 на J10
-Расположение выводов регулятора скорости 4×3
-ИК-контакты для транспондера времени прохождения круга