










B-CUBE.RC - Build Your Drone From here - Соберите свой дрон здесь!
ESP32S2 ESP32 Управление полетом Квадрокоптер с открытым исходным кодом ESP-Drone Модель дрона Wi-Fi Пульт дистанционного управления Crazyflie
ESP32S2 ESP32 Управление полетом Квадрокоптер с открытым исходным кодом ESP-Drone Модель дрона Wi-Fi Пульт дистанционного управления Crazyflie
Не удалось загрузить сведения о доступности самовывоза
ESP-Drone Quadcopter
ПРИМЕЧАНИЕ: в комплект не входит аккумулятор, вам понадобится аккумулятор 300MA 1S.
ESP-Drone — это дрон с открытым исходным кодом на базе Wi-Fi-чипа Espressif ESP32/ESP32-S2/ESP32-S3, которым можно управлять по сети Wi-Fi с помощью мобильного приложения или геймпада. ESP-Drone поддерживает несколько режимов полёта, включая режим стабилизации, режим удержания высоты и режим удержания положения. Благодаря простому аппаратному обеспечению, понятной и расширяемой архитектуре кода, ESP-Drone может использоваться в STEAM-образовании и других областях. Основной код перенесён из проекта Crazyflie с открытым исходным кодом по протоколу GPL3.0.
Мы загрузили прошивку для ESP32-S2-Drone V1.2, вам не нужно загружать прошивку, просто правильно установите двигатель и пропеллер, после чего вы сможете управлять ESP32-S2-Drone с помощью мобильного телефона.
Пожалуйста, прочтите инструкцию здесь,
Основные характеристики
ESP-Drone имеет следующие особенности:
Аппаратное обеспечение:ESP32-S2-Drone V1.2
-
Режим стабилизации: обеспечивает устойчивость дрона для достижения плавного полета.
-
Режим удержания высоты: контролируйте выходную тягу, чтобы удерживать дрон в полете на фиксированной высоте.
-
Режим удержания позиции: удерживает дрон в фиксированном положении.
-
Отладка на ПК: используйте cfclient для статической/динамической отладки.
-
Управление через приложение: легкое управление через Wi-Fi с помощью мобильного приложения.
-
Управление с помощью геймпада: легкое управление с помощью геймпада с помощью cfclient.


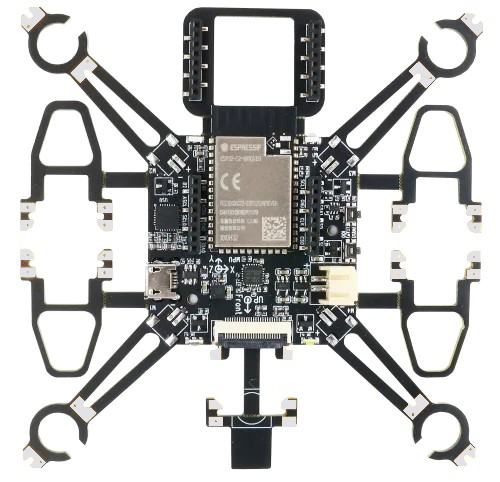

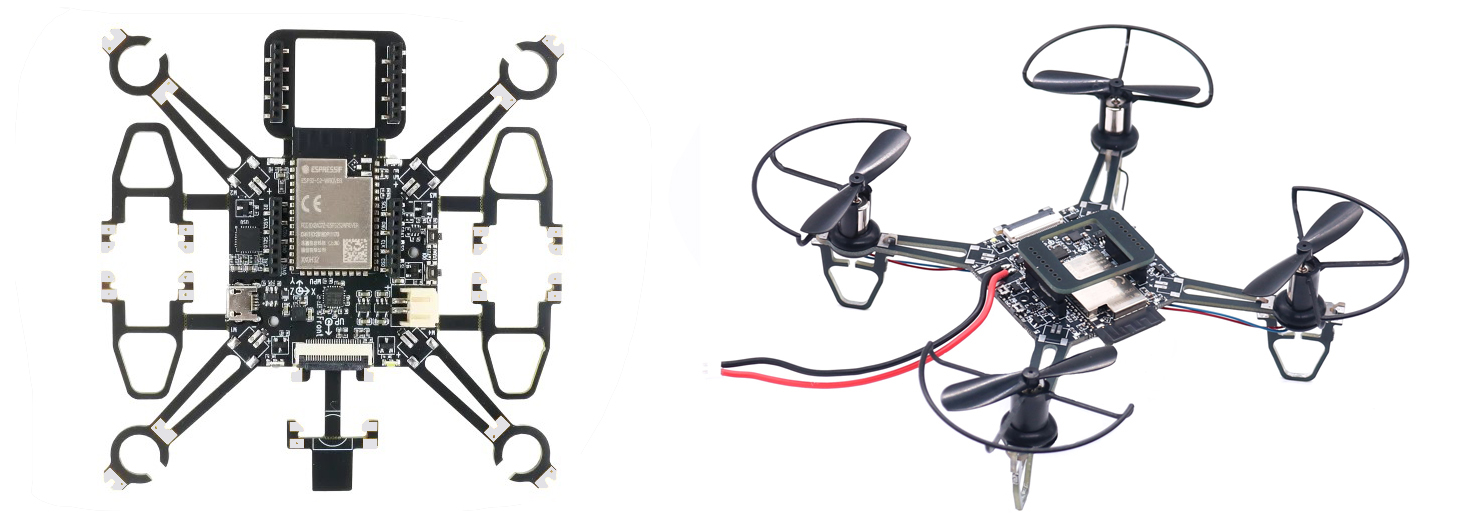
Для сборки ESP32-S2-Drone V1.2 следуйте инструкциям ниже.

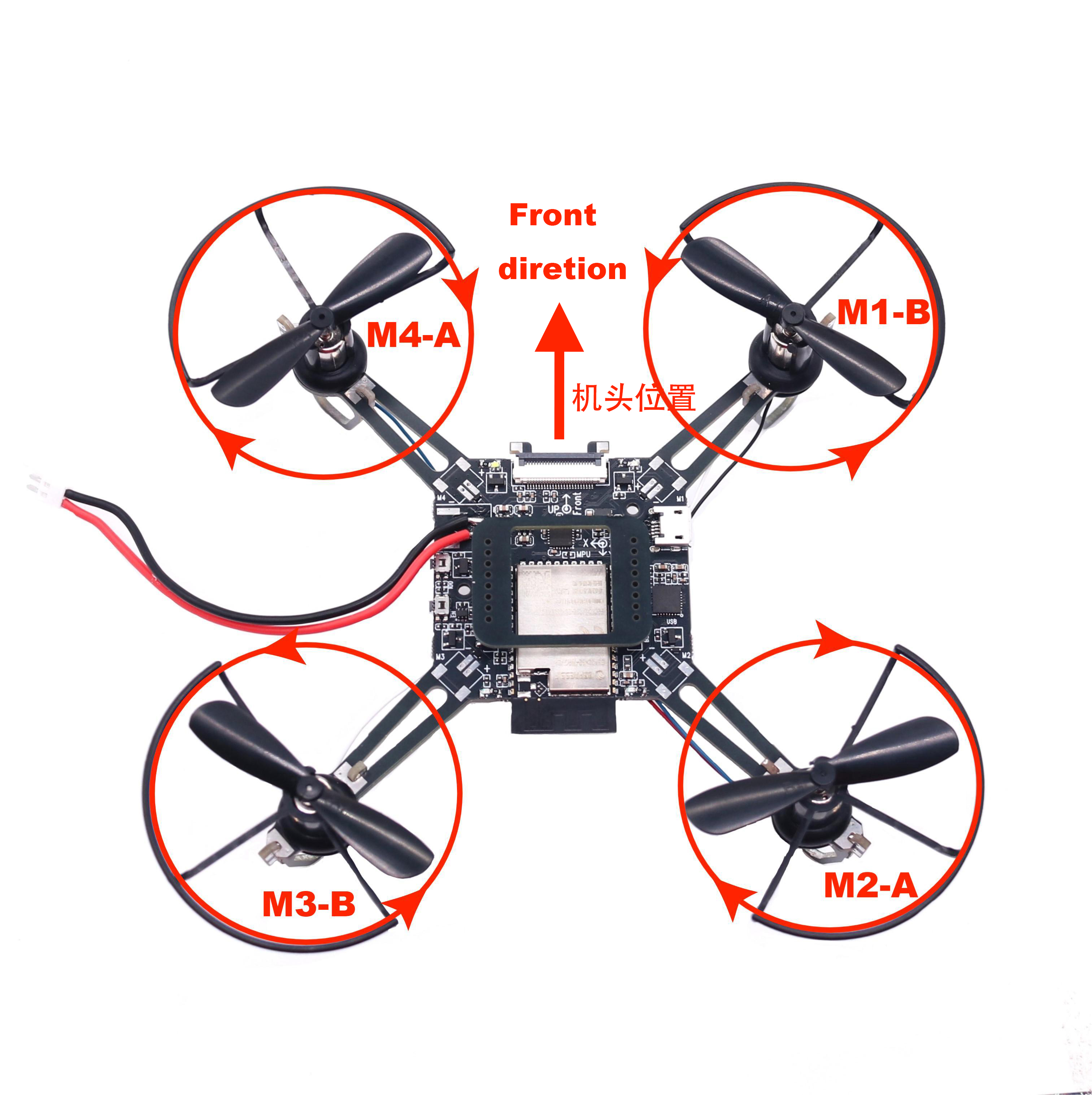
Направление вращения пропеллера
-
Установите винты A и B, как показано на рисунке ниже.
-
Во время самотестирования при включении проверьте, правильно ли вращаются пропеллеры.
Управление полетом
-
Нажмите кнопку/значок «Подключиться» в приложении. После успешного установления соединения между дроном и приложением светодиод на дроне замигает ЗЕЛЕНЫМ.
-
Слегка сдвиньте «Thrust», чтобы поднять дрон в воздух.
-
Управляйте полетом, перемещая пальцы в приложении.

Предполетная проверка
-
Расположите дрон так, чтобы его голова была спереди, а хвост (т. е. часть с антенной) — сзади.
-
Поместите дрон на ровную поверхность и включите его, когда он остановится.
-
Проверьте в cfclient, ровно ли расположен дрон.
-
После установления связи проверьте, мигает ли светодиод на хвосте дрона ЗЕЛЕНЫМ цветом быстро.
-
Проверьте, мигает ли светодиод на головке дрона КРАСНЫМ цветом, что указывает на низкий заряд батареи.
-
Слегка сдвиньте контроллер Trust в левой части приложения вперед (т. е. команды контролируются левым пальцем), чтобы проверить, может ли дрон быстро отреагировать на команду.
-
Переместите палец в правую командную область приложения (т. е. команды, контролируемые правым пальцем), чтобы проверить, правильно ли работает управление направлением.
-
Летайте и получайте удовольствие!












