










B-CUBE.RC - Build Your Drone From here- Build Your Drone From here!
B-CUBE ESP32-Drone V2.0 Flight Control Open Source Quadcopter ESP-Drone Drone Model Wifi Remote Control Crazyflie
B-CUBE ESP32-Drone V2.0 Flight Control Open Source Quadcopter ESP-Drone Drone Model Wifi Remote Control Crazyflie
Couldn't load pickup availability
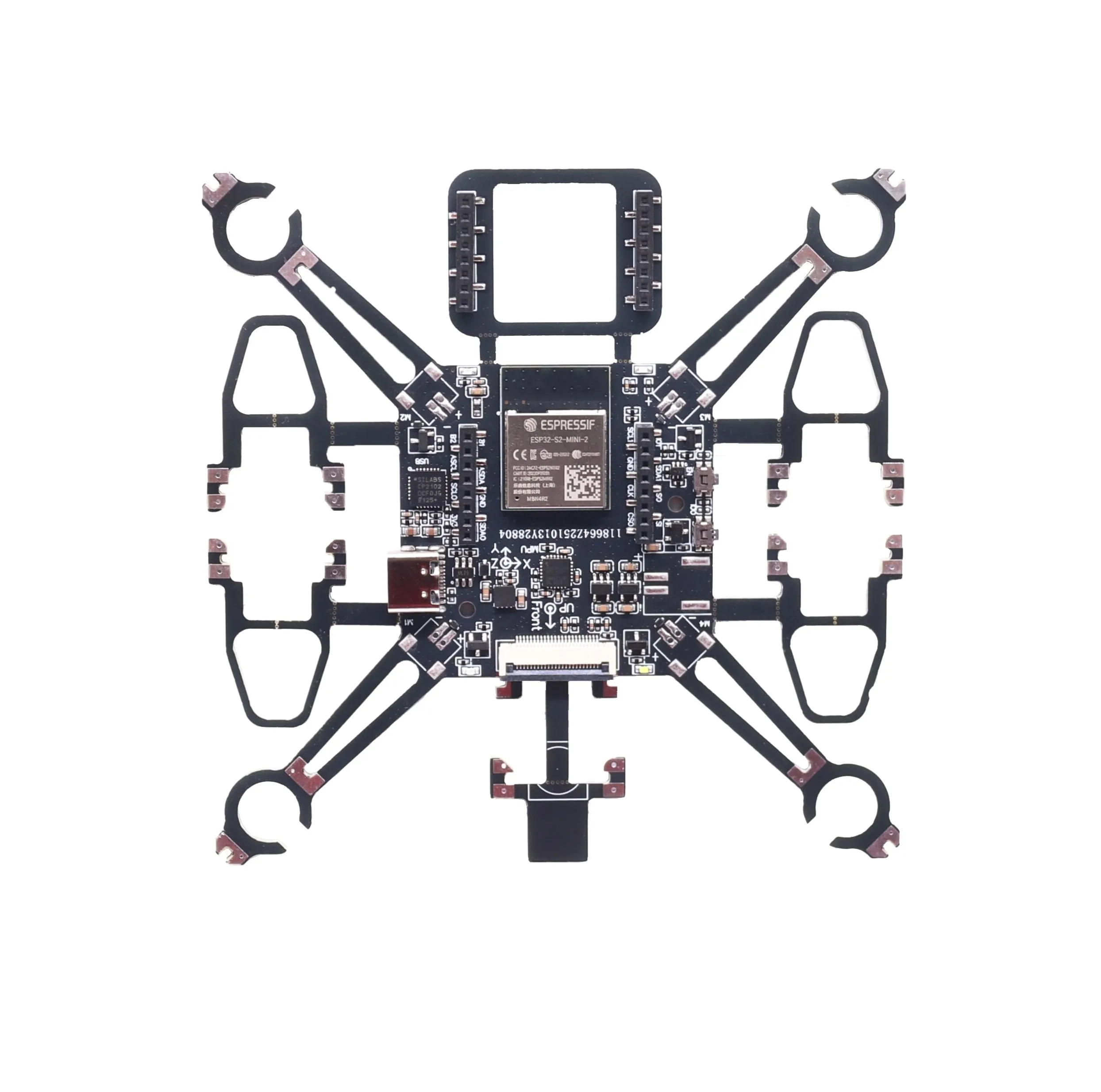
ESP32-S2-Drone V2.0
NOTE: Network hotspot: ESP-Drone_XXXXXX
Password: 12345678
Battery:1S 3.7V 300-800ma (The supply voltage cannot exceed 4.2V)
ESP-Drone is an open source drone solution based on Espressif ESP32-S2 Wi-Fi chip, which can be controlled over a Wi-Fi network using a mobile APP or gamepad. ESP-Drone supports multiple flight modes, including Stabilize mode, Height-hold mode, and Position-hold mode. With simple hardware, clear and extensible code architecture, ESP-Drone can be used in STEAM education and other fields. The main code is ported from Crazyflie open source project with GPL3.0 protocol.
We had upload the firmware for ESP32-S2-Drone V2.0, you no need to upload firmware, just install the motor and propeller correctly, then you can control the ESP32-S2-Drone with your mobile phone.Please read the instructions here,https://docs.espressif.com/projects/espressif-esp-drone/en/latest/gettingstarted.html#esp-drone-overview
Main Features ESP-Drone has the following
features:Hardware:ESP32-S2-Drone V2.0
Stabilize mode: keep the drone stable to achieve smooth flight.
Height-hold mode: control thrust output to keep the drone flying at a fixed height.
Position-hold mode: keep the drone flying at a fixed position.
PC debugging: use cfclient for static/dynamic debugging.
Controlled by APP: easily controlled over Wi-Fi by your mobile APP.
Controlled by gamepad: easily controlled via the gamepad by cfclient.




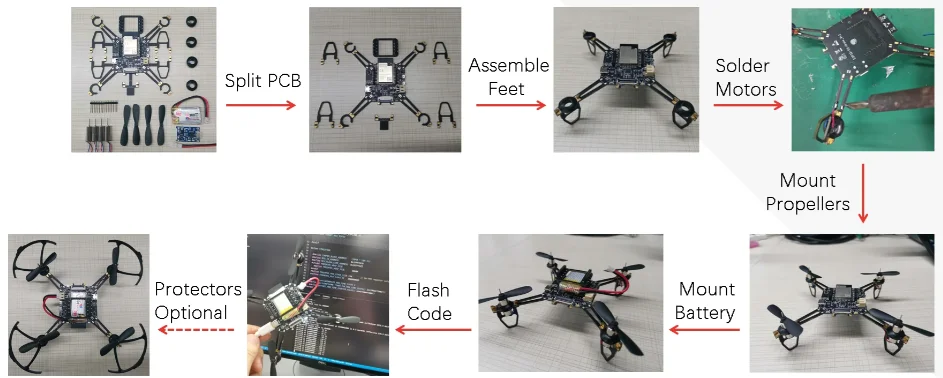
Please follow the steps below to assemble ESP32-S2-Drone V2.0.
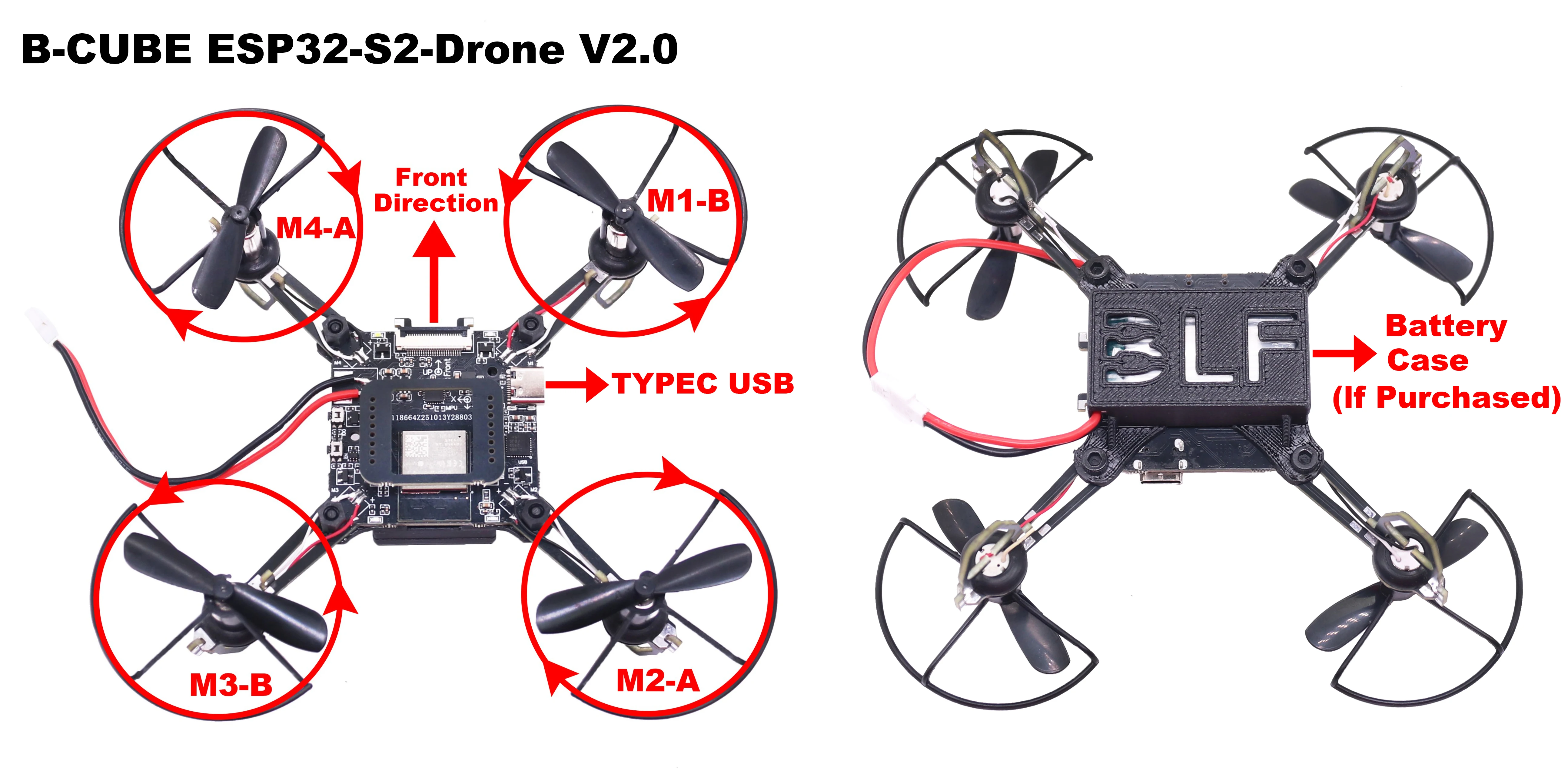
Propeller Direction
Install A and B propellers according to the figure below.
During the power-on self-test, check if the propellers spin properly.
If the motor rotates in the wrong direction, simply change the position of the motor wire.
Please note: The battery case is sold separately or included only with specific kits. If needed, please purchase it individually.
Flight Control
Click Connect” button/icon at your APP. When the connection is established successfully between your drone and APP, the LED on the drone blinks GREEN.
Slide Thrust” slightly to take off the drone.
Control the flight by moving your fingers on the APP. 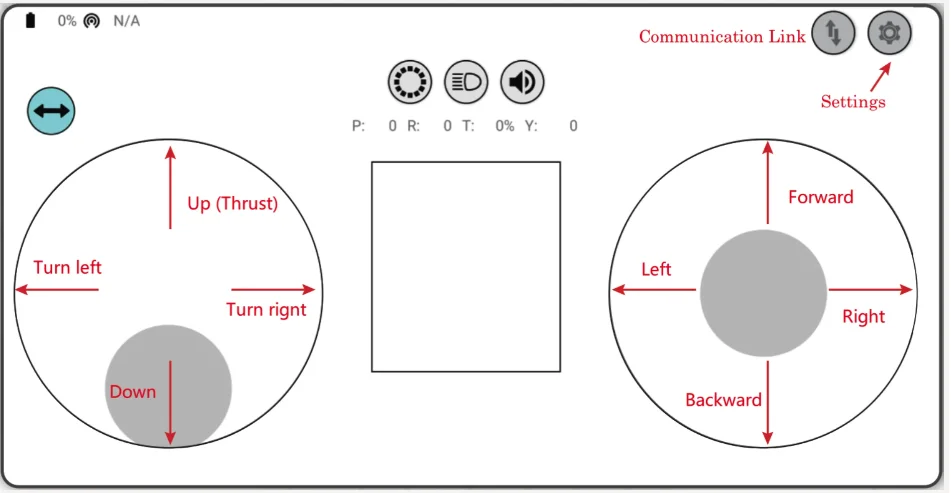
Preflight Check
Place the drone with its head on the front, and its tail (i.e. the antenna part) at the back.
Place the drone on a level surface and power it up when the drone stays still.
Check on the cfclient if the drone is placed level.
After the communication is established, check if the LED at the drone tail blinks GREEN fast.
Check if the LED on the drone head blinks RED, which indicates battery LOW.
Slide forward the Trust controller slightly at the left side of your APP (i.e. the commands controlled by your left finger), to check if the drone can respond the command quickly.
Move your finger at the right command area of the APP (i.e. the commands controlled by your right finger), to check if the direction control works well.
Go fly and have fun!
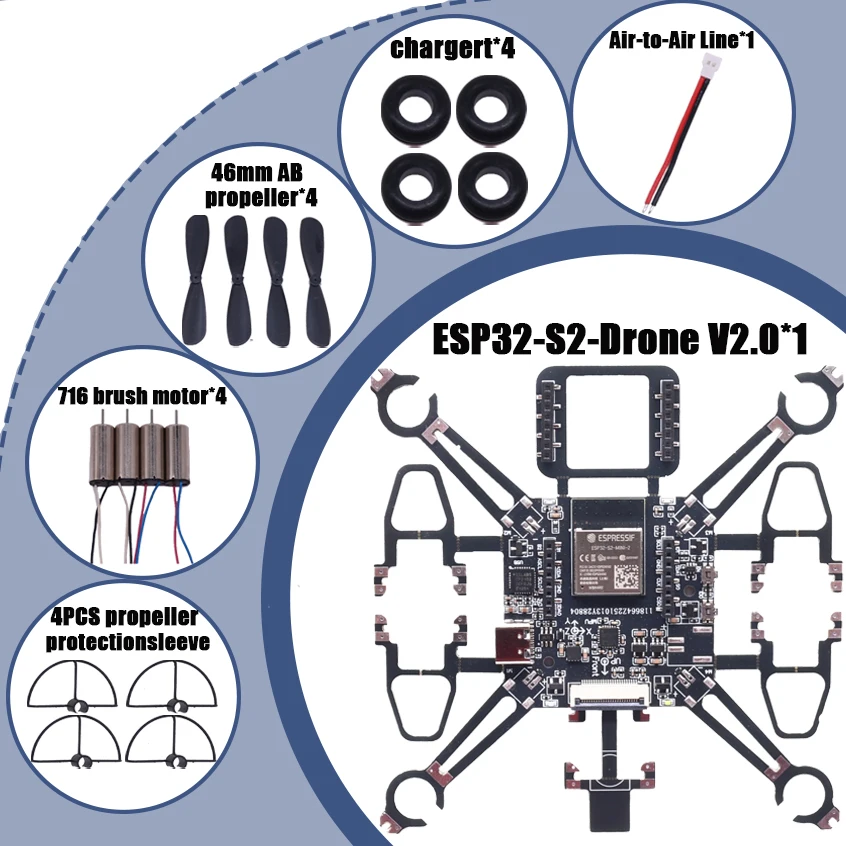
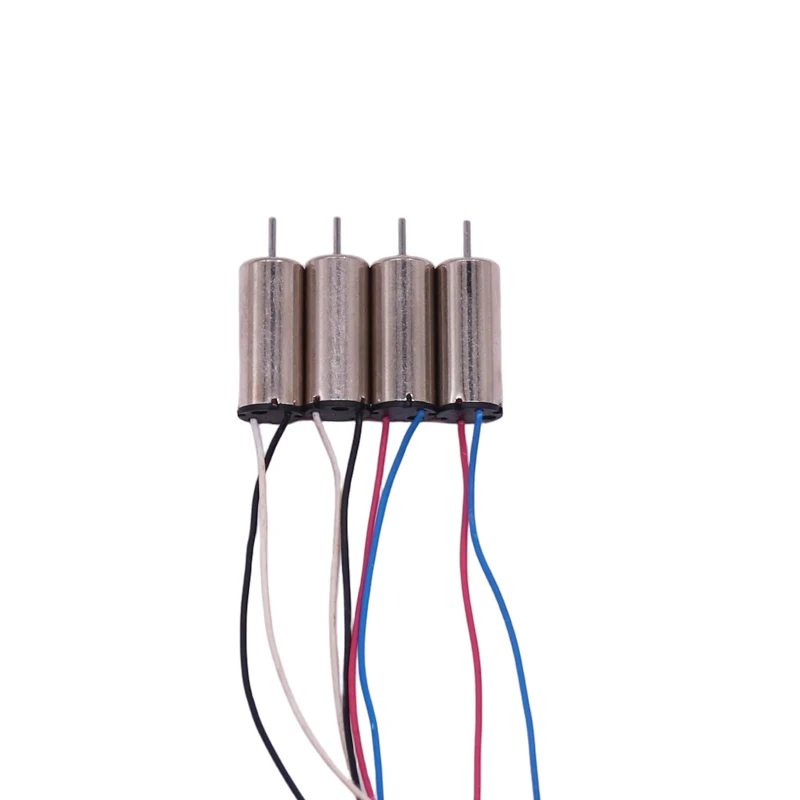
716 brush motor
 46mm AB propeller
46mm AB propeller 4PCS propeller protectionsleeve
4PCS propeller protectionsleeve
 chargert*4
chargert*4
 Battery Case*1
Battery Case*1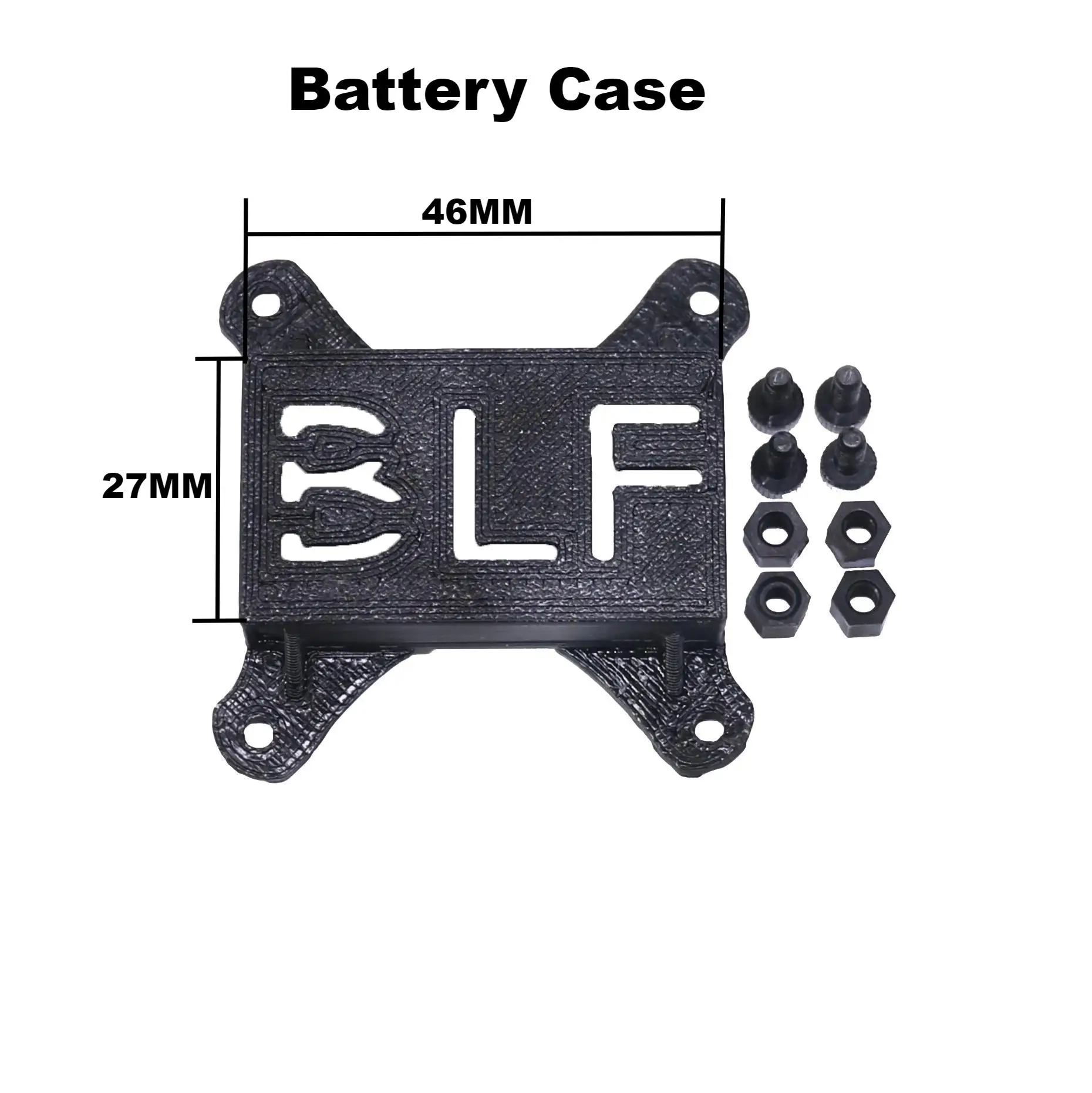 1S 3.7V 800MA battery
1S 3.7V 800MA battery Air-to-Air Line*1
Air-to-Air Line*1












