B-CUBE.RC - Build Your Drone From here- Build Your Drone From here!
B-CUBE MiNi APM With Casing V3.3 Flight Controller Ardupilot Quadcopter Multicopter APM2.8 Plane
B-CUBE MiNi APM With Casing V3.3 Flight Controller Ardupilot Quadcopter Multicopter APM2.8 Plane
Verfügbarkeit für Abholungen konnte nicht geladen werden
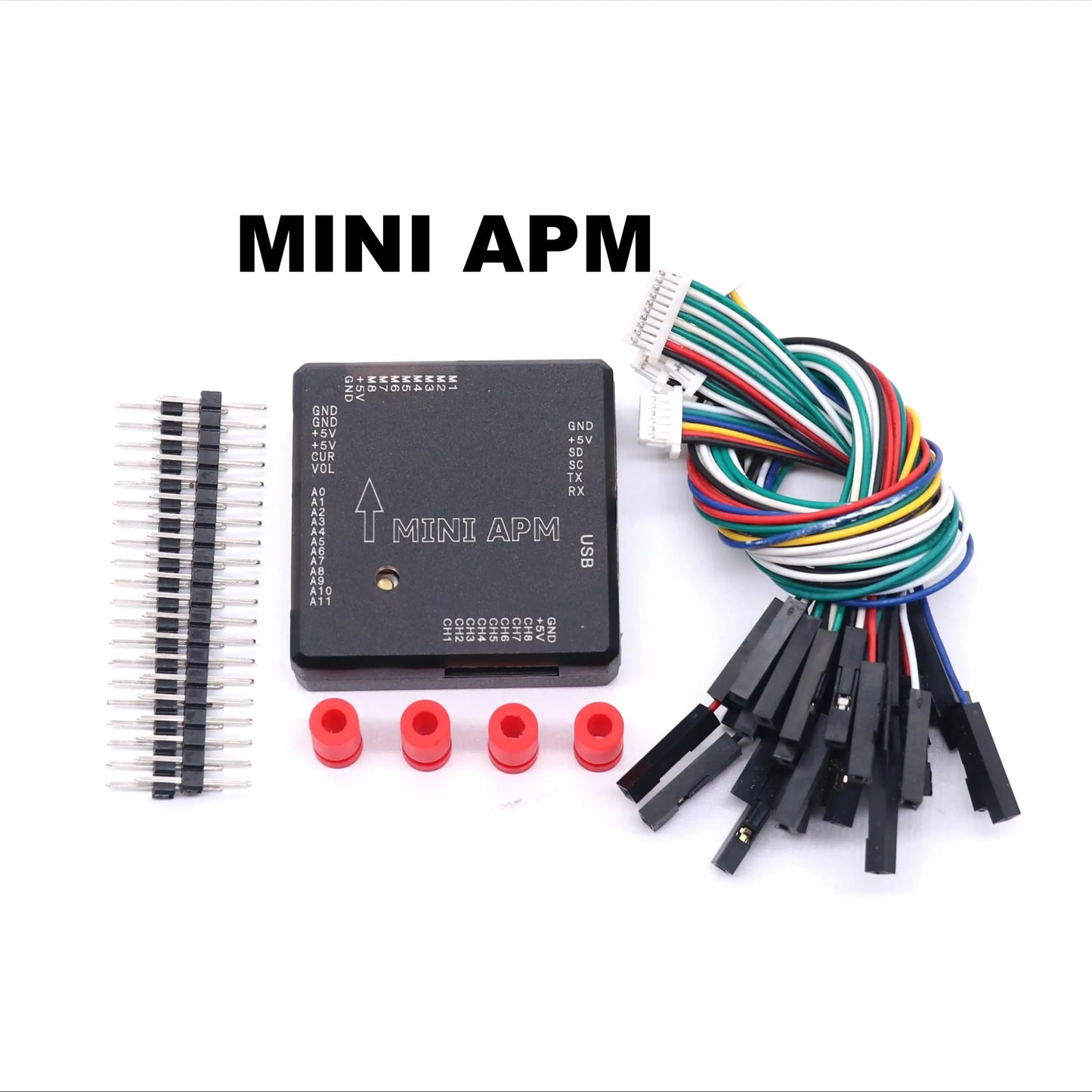
MINI APM Flight Control V3.3
Description:
APM is the ArduPilot Mega series control for short, is currently the highest cost-effective UAV autopilot products, by America 3DRobotics design.
This product is compatible with Arduino, and a portion of the first 4 letters used as product name, so you can see that this project is an open source project.
APM supports almost all visible model: conventional fixed wing, wing, helicopter, multi axle vehicle, vehicle and ship and many other models, complete functions and can be selected in the collocation of fitting case provides automatic return and automatic navigation point standard UAV autopilot for.
The mini version of the APM source control, the default does not contain the GPS module, GPS module supporting the use of customers before the standard version.
In addition, the flight control because many open source data, in principle does not provide specialized technical support, if you are a novice, you need to make sure you can finish the assembly debugging.
Interface: 8 output, 8 way output, GPS, digital +OSD, I2C (external Compass), voltage and current detection input, USB, power supply input
A0 -- A12 interface also has drawn in V3.3.
The function and the firmware and the same APM, and can be used in fixed wing and rotor.
-
Product Name: Mini APM V3.3 Flight control
-
Manufacturers number: MINI APM V3.3
-
Motherboard size: 35x35mm board size, 30x30mm hole to hole.
-
Hardware version: V3.3
-
Support mode: fixed wing helicopter multi rotor
-
Net weight: 20g
-
Internal compass:Without
-
8CH pwm input, 8 motor output.
-
12 way AUX input and output.
-
Full connection possibility, supports GPS, Extra compass, telemetry and power module.
Parameter:
-
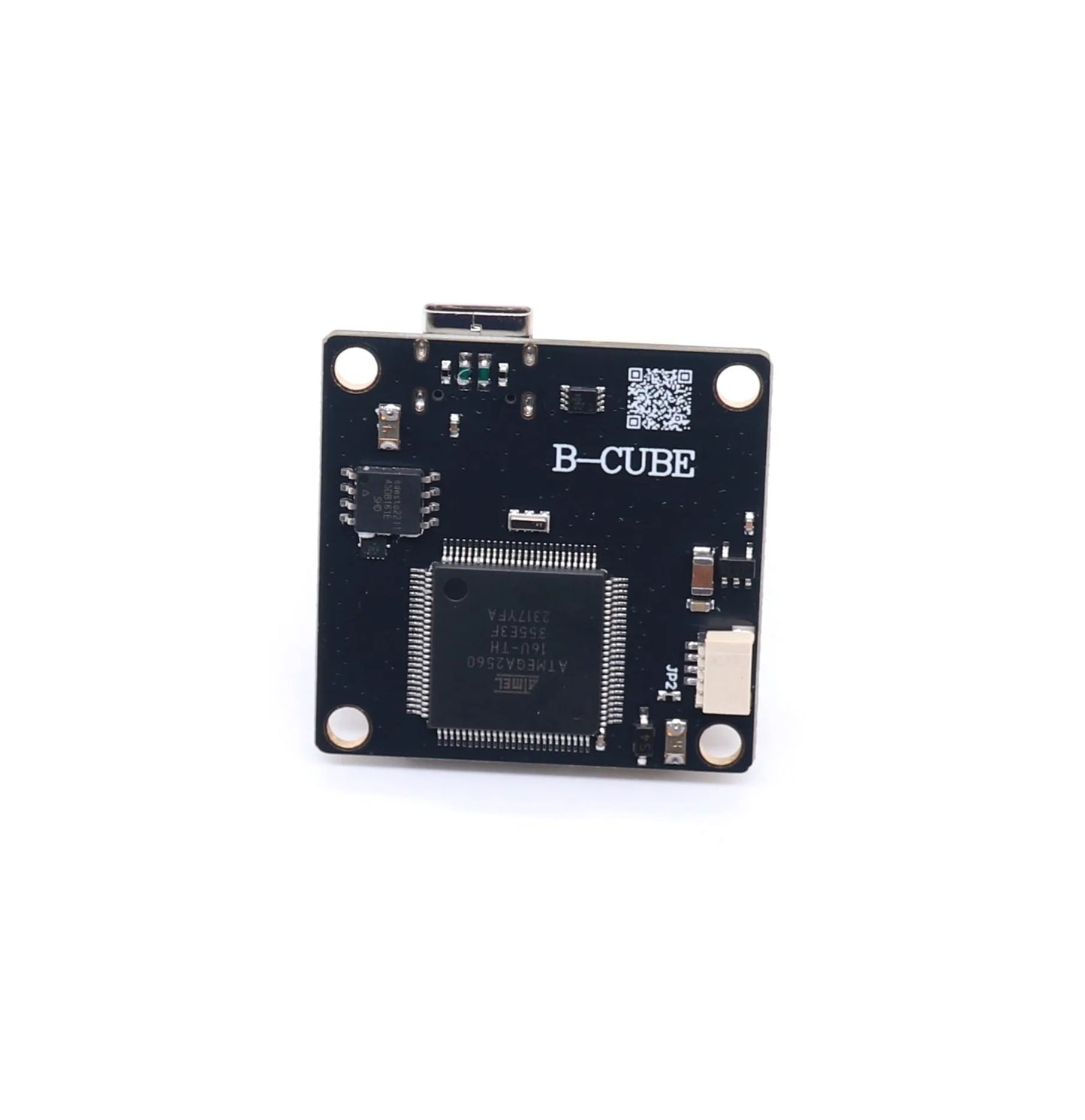
Main control chip: atmega2560
-
USB chip: atmega32u2
-
Barometer: MS5611
-
USB port: TYPE-C
Now the latest Mission planner has bug ,it can not calibrate Accel for APM,it can only used for PIXHAWK, please use version 1.3.74 for mini apm.
Download Mission Planner 1.3.74 from here,
https://firmware.ap.ardupilot.org/Tools/MissionPlanner/archive/MissionPlanner-1.3.74.msi
Select “install Firmware Legacy” to upload firmware, do not select “Install Firmware”,because “Install Firmware” is used for PIXHAWK,not APM.

Do not upload latest firmware (for example 4.0.3) offline for apm board.
Due to the limited memory space of the APM board, the latest firmware cannot be uploaded. If you use the mission planner to flash online, it will automatically help you to upload the firmware suitable for the APM board.For example, the copter firmware for apm is 3.2.1 (mission planner will help you upload this version),the latest version is for PIXHAWK , if you upload offline above 3.2.1, it will clear the bootloader of chip, when bootloader is broken, apm cannot work, also cannot upload new firmware.
APM 2.x (APM 2.6 and later) are no longer supported for Copter, Plane or Rover. The last firmware builds that fit on this board are Copter 3.2.1, and Plane 3.4.0, and Rover 2.5.1.
So, upload firmware online at mission planner, if you upload offline, make sure the version is not above 3.2.1(copter, for example)