B-CUBE.RC - Build Your Drone From here- Build Your Drone From here!
B-CUBE PIXHAWK PRO Flight Control M9N Carbon Fiber 450 Frame Kit I2C PPM OLED RGB LED Ardupilot Quadcopter BLHELI 30A 2212 Motor ESC
B-CUBE PIXHAWK PRO Flight Control M9N Carbon Fiber 450 Frame Kit I2C PPM OLED RGB LED Ardupilot Quadcopter BLHELI 30A 2212 Motor ESC
Verfügbarkeit für Abholungen konnte nicht geladen werden
Simple Package:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motor

Standard Package:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motor
PIXHAWK PRO(white or black shell)+ 4G TF Card + Safety Button + Buzzer + PPM Encoder + I2C Expansion Board+ 3 Line(4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4)+M9N GPS+ GPS Holder+ 3DR Power Module+ Shock Absorber

High Package:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motor
PIXHAWK PRO(white or black shell)+ 4G TF Card + Safety Button + Buzzer + PPM Encoder + I2C Expansion Board+ RGB Led + OLED Screen+ 3 Line(4Pin 1.25 ,6Pin 1.25 ,3Pin 2.5.4)+M9N GPS+ GPS Holder+ 3DR Power Module+ Shock Absorber





M9N GPS Module
M9N is a GPS module commonly used in unmanned aerial vehicles, with the following characteristics and applications:
High precision positioning: The M9N adopts advanced GNSS technology, supports multiple satellite navigation systems, and can provide high-precision position positioning information. For unmanned aerial vehicles, it can achieve accurate positioning and navigation.
Multi system support: The M9N supports multiple satellite navigation systems, including GPS, GLONASS, Galileo, BeiDou, etc. This allows drones to receive multiple satellite signals simultaneously, improving positioning accuracy and reliability.
Quick positioning: M9N has fast cold start and hot start times, which can quickly obtain satellite signals and perform positioning, making it crucial for the rapid takeoff and task execution of unmanned aerial vehicles.
Strong anti-interference ability: M9N has excellent anti-interference performance, which can work stably in complex electromagnetic environments and is not susceptible to interference from other electronic devices.
In drone applications, M9N can be used in the following aspects:
Positioning and Navigation: The M9N provides accurate position and speed information to help drones achieve precise navigation and flight control.
Waypoint navigation: By inputting pre-set waypoint information into M9N, unmanned aerial vehicles can automatically fly according to the route, achieving autonomous waypoint navigation tasks.
Multi aircraft collaboration: Multiple drones can use the M9N module for positioning and synchronization to achieve applications such as team collaborative flight and formation flight.
Return to return: The M9N can provide accurate return positioning information, enabling the drone to safely return to the takeoff point or preset return point.
M9N can search for more satellites outdoors with higher accuracy, faster search speed, and better stability.(The specific number of star searches is determined by the environment at that time.)


Frame 450:




 A.Features
A.Features
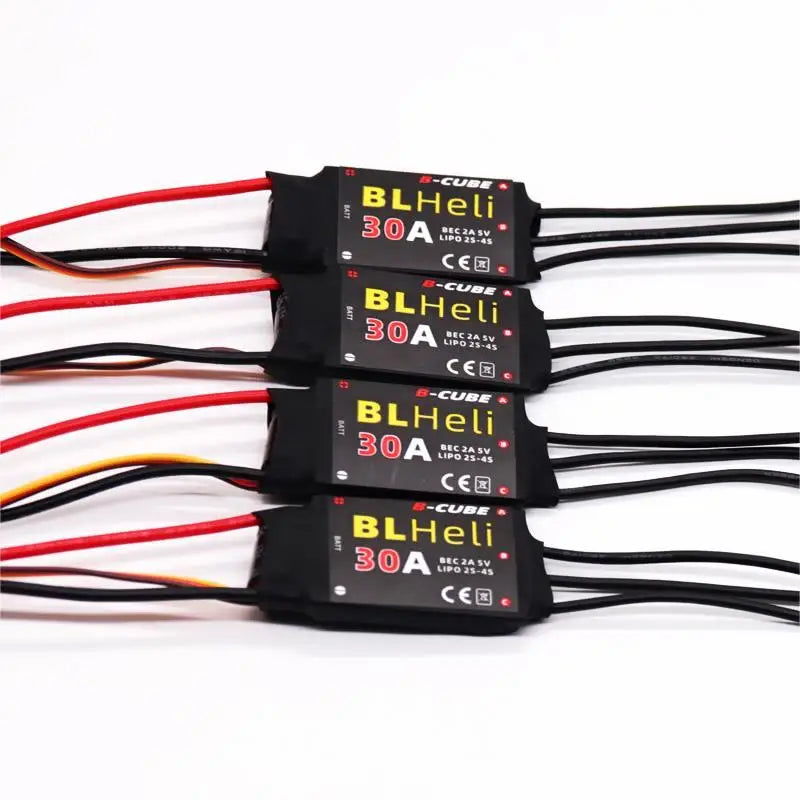
A1: Use authentic electronic components to ensure high quality and enhance the current endurance ability of the ESC.
A2: Based on BLHeli firmware, optimized for high performance with great linearity and much quicker throttle response.
A3: Special designed for multirotors, and compatible with fixed-wing aircrafts and helicopters.
A4: Multiple protection features including Low-voltage cut-off protection / over-heat protection / throttle signal loss protection.
A5: Throttle range can be configured and is fully compatible with all receivers, providing smooth, linear and precise throttle response. A6: All parameters can be programmed via using a transmitter, including default settings.
B. Productspecification


1045 Propellers

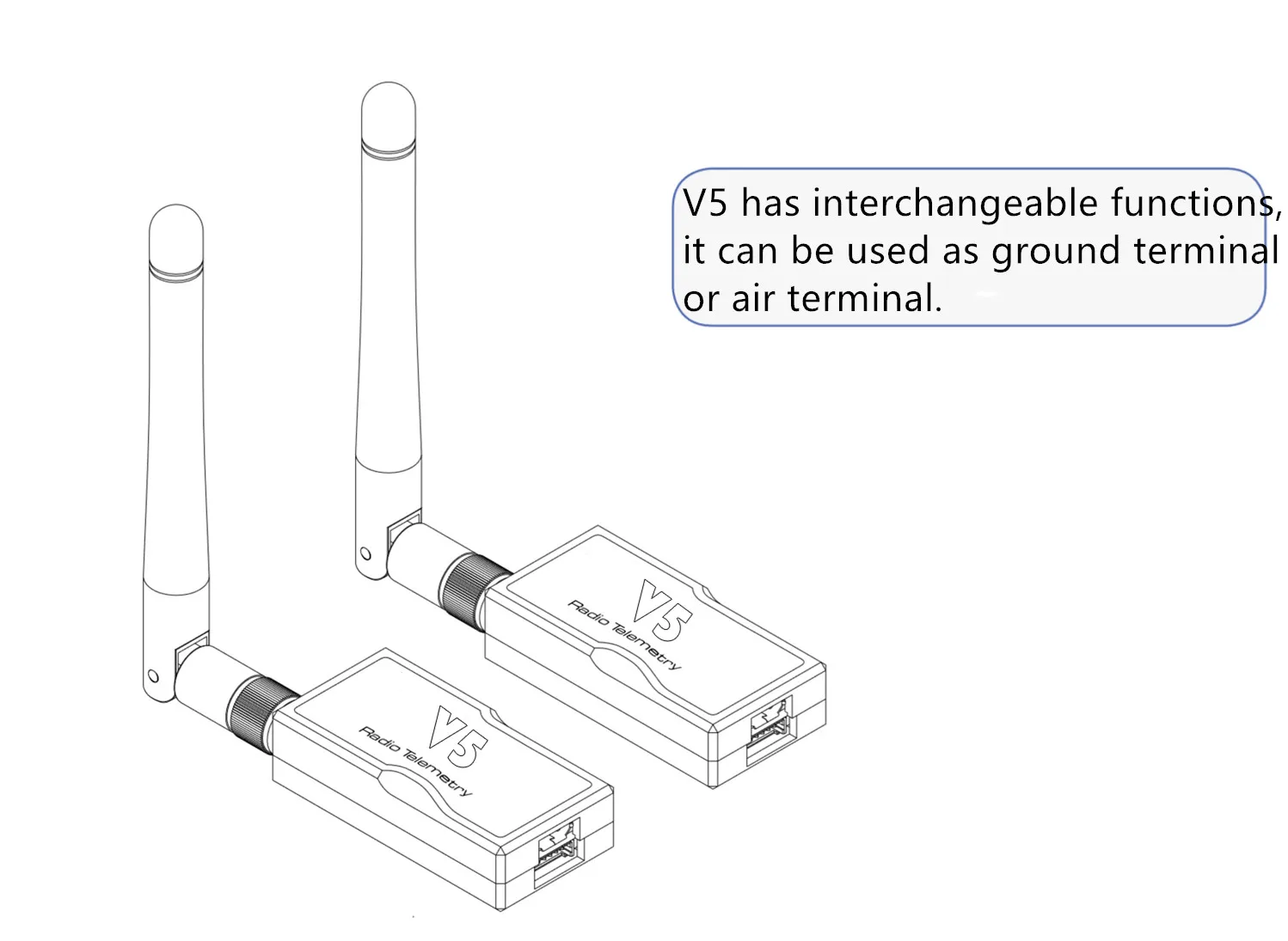
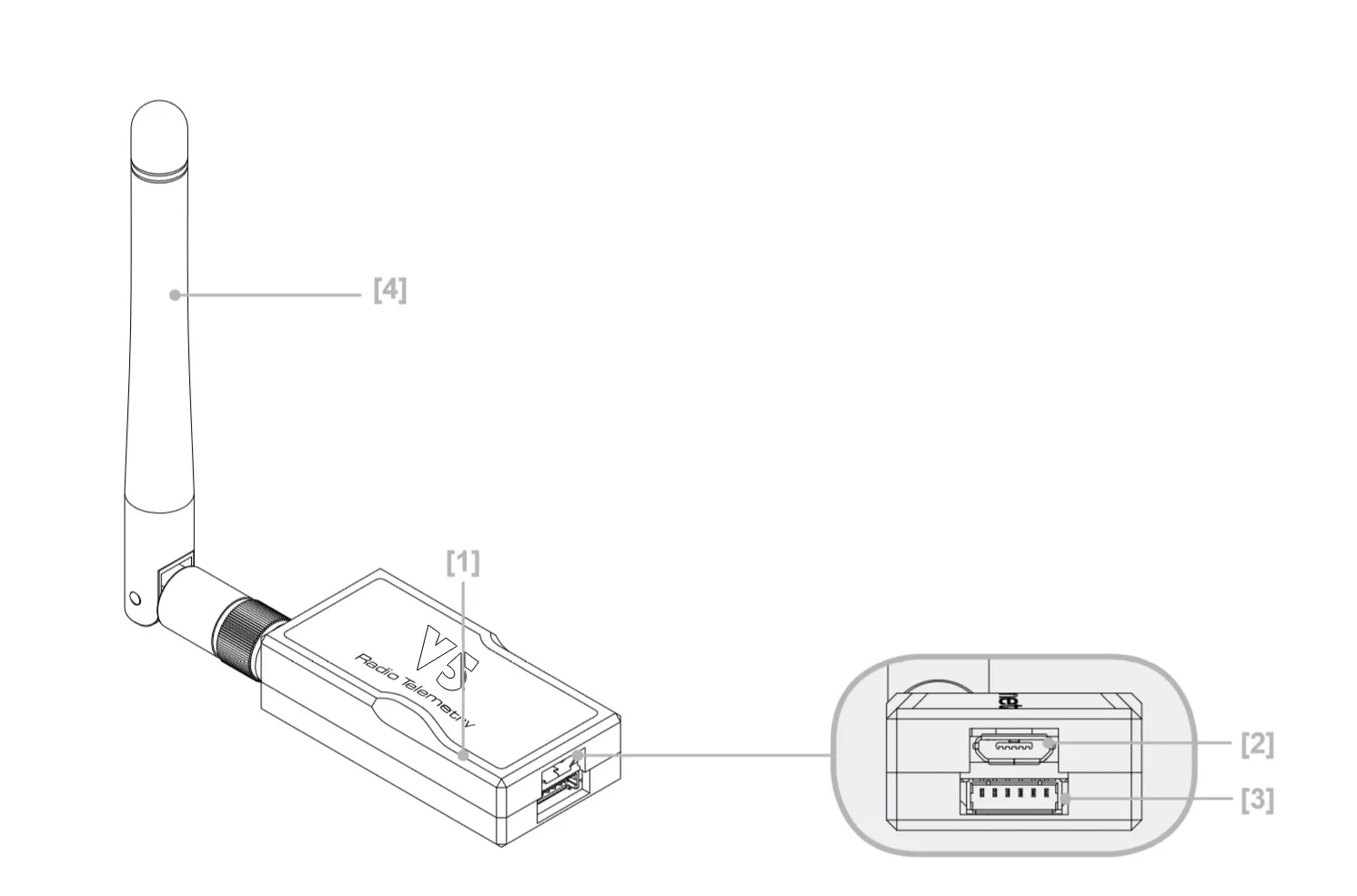
Radio telemetry can be used for wireless communication between pixhawk and computer or mobile phone.
This article explains how to connect the ESCs, motors and propellers to a autopilot. The Pixhawk is used as an example but other autopilots are connected in a similar way.
Connect the power (+), ground (-), and signal (s) wires for each ESC to the autopilot’s main output pins by motor number. Find your frame type below to determine the assigned order of the motors.

Pixhawk Outputpins (numbered). First 4 pins are colour-coded for connecting a Quadframe
Motor order diagrams
The diagrams below show motor order for each frame type. The numbers indicate which output pin from the autopilot shoould be connected to each motor/propeller. The propeller direction is shown in green (clockwise, CW) or blue (counter-clockwise, CCW)

Legend for motor-order diagrams
Quadcopte

Recognizing clockwise and counterclockwise propellers

The diagrams above show two types of propellers: clockwise (called pushers) and counterclockwise (called pullers). The most reliable to recognize the correct propeller type by its shape as shown below. The thicker edge is the leading edge which moves in the direction of rotation. The trailing edge is more radical scalloped and usually thinner.
How to install Motor?