B-CUBE.RC - Build Your Drone From here- Build Your Drone From here!
B-CUBE F4V3S/F4V3S PLUS FC Flight Controller Board Barometer OSD for QAV250 220 RC Drone FPV Racing Quadcopter Betaflight INAV
B-CUBE F4V3S/F4V3S PLUS FC Flight Controller Board Barometer OSD for QAV250 220 RC Drone FPV Racing Quadcopter Betaflight INAV
Verfügbarkeit für Abholungen konnte nicht geladen werden
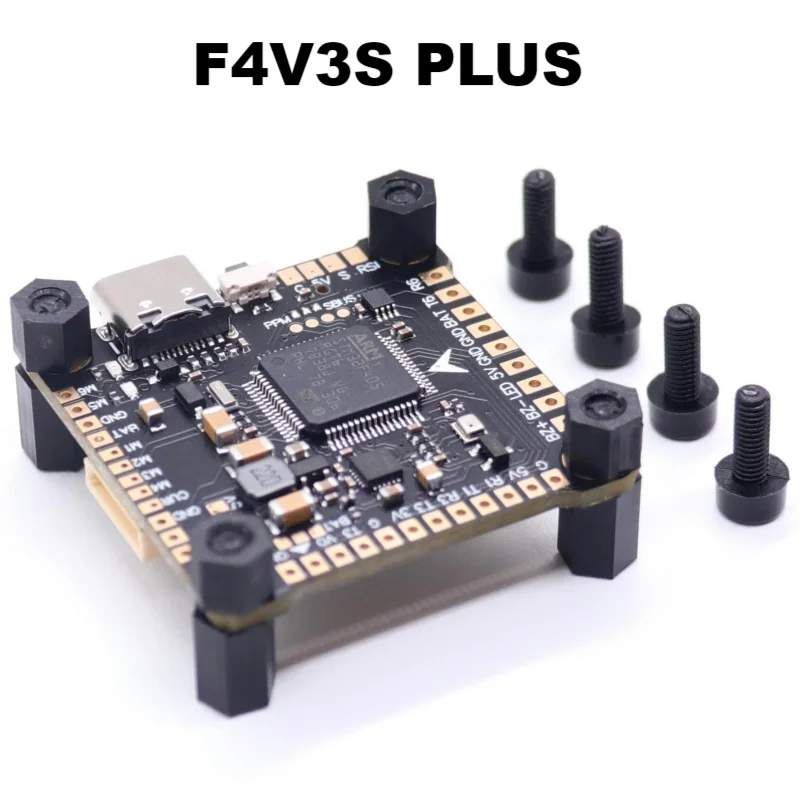
F4V3S PLUS Flight Controller
Note : F4V3S PLUS uses a TYPEC USB port. Please ensure that you have a TYPEC USB cable that can communicate normally. Some USB cables can only be charged and cannot communicate data with flight control. If the USB cable you use cannot recognize the flight control USB port, it indicates that your USB cable cannot communicate with data normally. We upload firmware to the flight control through USB and conduct testing, so it can be very guaranteed that the USB port of the flight control is normal.
If you are unable to confirm if your USB cable is communicating properly, please purchase one.
TYPEC USB line: https://www.aliexpress.us/item/3256805282876420.html
Specification:
Item name: F4V3S PLUS Flight Controller
Firmware:OMNIBUSF4SD(AIRB)
USB Port: TYPE-C
Size: 36x36mm
Mounting holes: 30.5x30.5mm
STM32 F405 MCU
Dshot support
Drag and Drop OSD configured via Betaflight
MPU6500 6 axis SPI gyro & accelerometer
SBUS / PPM AND Spketrum DSMX ports
MicroSD card blackbox
Baro (BMP280)
5V3A 9V3A BEC
On-board video filters
Properties:
measured.
Boasting a F4 processor, on-board Betaflight OSD, MicroSD Black Box, 5v3a sbec, video filter, you'll be tuning PIDS with your transmitter and tear it to the track in no time!
Note : F4V3S PLUS supports cleanflight ,betaflight and INAV firmware.



Use UART6 for remote control receiver (PPMor SBUS)

Ublox NEO-M8n GPS with QMC5883 Compass
GPS :NEO-M8N
compass :QMC5883
Size: 36x36mm
Mounting holes: 30.5x30.5mm
M8N GPS is a commonly used GPS receiver module produced by u blox company. It adopts a u-blox M8N chip, which has high accuracy and sensitivity in positioning performance.
The M8N GPS module supports multiple Satellite navigation, including GPS, GLONASS, Galileo and BeiDou. It can receive and process satellite signals from these navigation systems, achieving accurate acquisition of position, velocity, and time information.
The M8N GPS module is usually provided in the form of a small circuit board, with UART serial port and I2C interface, facilitating communication with microcontrollers or other devices. It can also receive satellite signals through external antennas and has a power management circuit and backup battery to maintain the durability of satellite data and configuration.
This module provides rich configuration options that can be set and adjusted through serial port commands or configuration software. Users can choose appropriate working modes, update rates, navigation parameters, etc. according to their needs.
The M8N GPS module is widely used in fields such as unmanned aerial vehicles, vehicle tracking, navigation, and aviation, providing reliable positioning and navigation functions.






1.How to connect?
This is the interface definition diagram of F4V3S PLUS.
The definition of GPS line is as follows:
Red: VCC (+ 5V)
Black: GND
Green: TXD
Yellow: RXD
Purple: SCL
White: SDA

NOTE:GPS’s TX should connect to F4V3S’s RX, GPS’s RX should connect to F4V3S’s TX, This step is very important.
2.How to setup for M8N GPS?
set up for M8N GPS:

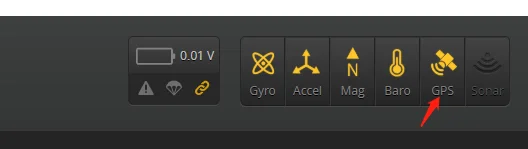
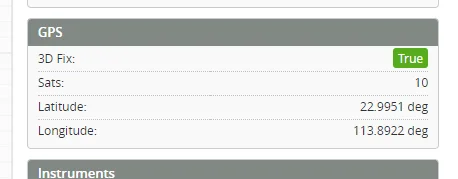
Then save and reboot.

Then save and reboot. Then you will see GPS mark is on.


2.How to setup for QMC5883 compass?
Note:if you use INAV firmware, no need this step, because INAV firmware can detect compass automatically. Betaflight and cleanflight firmware should do this step.

goto CLI screen to input command
resource I2C_SCL 2 B10
resource I2C_SDA 2 B11
resource SERIAL_TX 3 none
resource SERIAL_RX 3 none
set mag_bustype = I2C
set mag_i2c_device = 2
set mag_i2c_address = 0
set mag_hardware = AUTO
save
According to the above command input, press the ENTER key of the keyboard after each line of command input. Remember to enter the “save” command at the end, otherwise all commands will not work.
The above command means to disable serial 3 and enable I2C function, because serial port 3 and I2C share one interface,we must manually enable I2C and disable serial 3.
Then reboot the board.You will see the Mag mark is on.more information ,you can read here.https://www.rcgroups.com/forums/showthread.php?3073449-Omnibus-Nano-F4-v6/page15


VTX1000 Item Specifics:
Item name: VTX1000 LITE FPV video transmitter
Input voltage: DC 7-27V
Input current: 3s or 4s battery, 600mW=360 MA±10MA
Output voltage: DC 5V 1A
Output power: 25/100/200/400/600mW switchable
Channel: 48CH
Frequency switch: manual button/OSD (simultaneous support)
Connector: MMCX
Size: 36x36x9mm
Mounting hole: 30.5x30.5mm, M3
Features:
-Stable output power, long transmission distance
-Fast 5-speed power switch, independent two red indicator, indicating the current output power 25/ 200/ 400/ 600MW
-Using 4(blue)*3(green) LED display 48 channel
-Support OSD signal remote frequency control, support PIT mode ( omW output power only can be open in OSD)
-With power filter
-Antenna using MMCX to SMA reducing the space
-Strong power chip, input up to 27V, output 5V/1A low ripple, less interference
-30.5mm*30.5mm mounting hole distance, suitable for CC3D, NAZE32, F3, F4, F7 flight controller

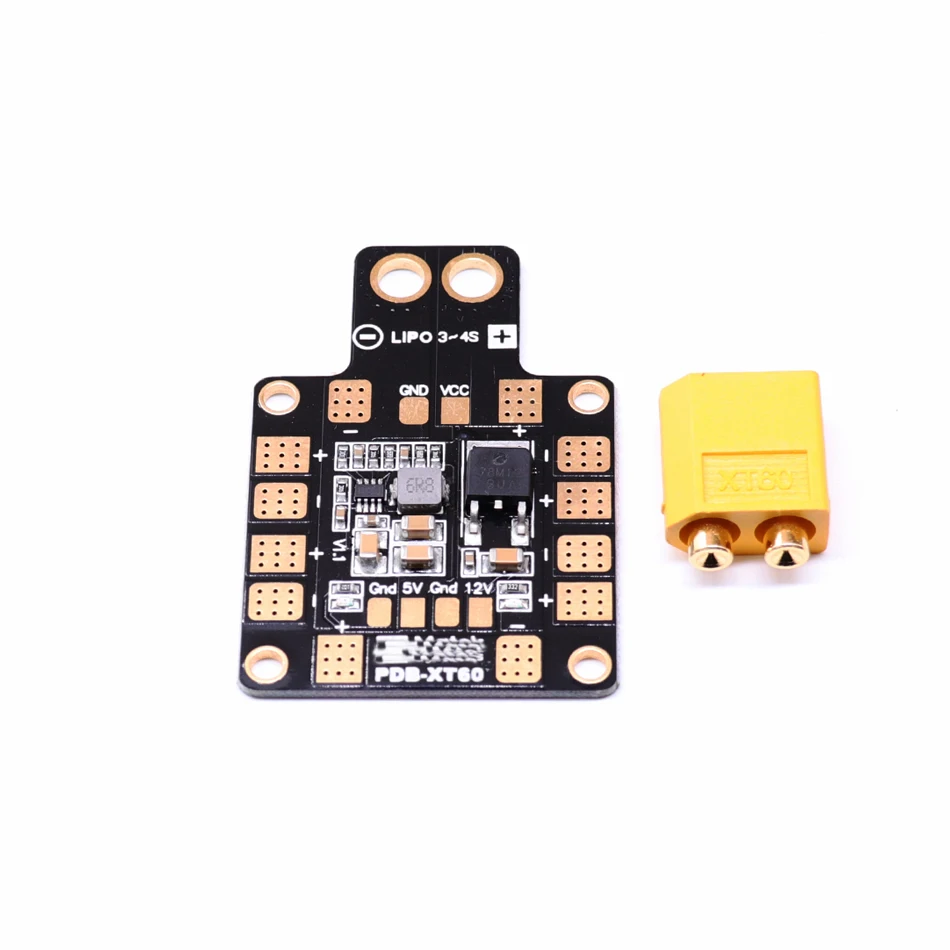
PDB
Description:
Model: MINI MS-1672 FPV cameras
Sensor: 1/1/8 "CMOS D1080H
Horizontal resolution: 2000TVL
Horizontal field of view: 165
Lens: 2.1mm lens
Video format: NTC&PAL (adjustable)
Image scale: 4:3&16:9 (automatic recognition)
Wide Dynamic Range: Super WDR
Noise reduction: 3DNR
Low illumination: 0.001LUX
Video output: CVBS
Day and night: external/internal/black and white/color
Language: (English/Chinese/Traditional Chinese/pyccnna)
ESOABIK/TTASSNO/FRABCAUS/
POSDIM/PORTUGUES/Japanese
Electronic Shutter: PAL: 1/50-100000NTSC: 1/60-100000
Wide voltage input: 5-36V
Working temperature: -20-60
Weight: 110g
Dimensions: 19 19 19mm
Resolution: 960 * 1080
Feature:
Upgraded Mista 2000TVL 2.1mm Wide Angle HD 1080P CCD PAL/NTSC Switchable 16:9 OSD FPV Camera.
Package included:
1 x Upgraded Mista FPV Camera

Ublox NEO-M8n GPS with QMC5883 Compass
GPS :NEO-M8N
compass :QMC5883
Size: 36x36mm
Mounting holes: 30.5x30.5mm
M8N GPS is a commonly used GPS receiver module produced by u blox company. It adopts a u-blox M8N chip, which has high accuracy and sensitivity in positioning performance.
The M8N GPS module supports multiple Satellite navigation, including GPS, GLONASS, Galileo and BeiDou. It can receive and process satellite signals from these navigation systems, achieving accurate acquisition of position, velocity, and time information.
The M8N GPS module is usually provided in the form of a small circuit board, with UART serial port and I2C interface, facilitating communication with microcontrollers or other devices. It can also receive satellite signals through external antennas and has a power management circuit and backup battery to maintain the durability of satellite data and configuration.
This module provides rich configuration options that can be set and adjusted through serial port commands or configuration software. Users can choose appropriate working modes, update rates, navigation parameters, etc. according to their needs.
The M8N GPS module is widely used in fields such as unmanned aerial vehicles, vehicle tracking, navigation, and aviation, providing reliable positioning and navigation functions.


F4V3S flight controller
F4V3S flight controller Item Specifics:
Product Name: F4 Flight Controller Board
Material: Electronic component
Standard Board Size: about 36x36mm
Standard Size of Mount Hole: 30.5x30.5mm
Features:
-STM32 F405 MCU
-Dshot support
-Drag and Drop OSD configured via Betaflight Configurator
-Smartaudio v2 support Tune your PID's and configure the omnibus F C from your Transmitter
-MPU6500 6 axis SPI Gyro & Accelerometer (show as MPU6500 at inav-configurator if upload INAV firmware)
-SBUS/PPM AND Spketrum dsm-x Ports
-SD card blackbox
-Baro(BMP280)
-5V 3A SBEC
-On-board Video Filter(only can supply 5V to VTX and Camera)
-SmartAudio V2 via tx6 on J10
-4×3 pin ESC pin layout
-IR pins for lap timing transponder

Material: Electronic component
Standard Board Size: about 36x36mm
Standard Size of Mount Hole: 30.5x30.5mm
Features:
-STM32 F405 MCU
-Dshot support
-Drag and Drop OSD configured via Betaflight Configurator
-Smartaudio v2 support Tune your PID's and configure the omnibus F C from your Transmitter
-MPU6500 6 axis SPI Gyro & Accelerometer (show as MPU6500 at inav-configurator if upload INAV firmware)
-SBUS/PPM AND Spketrum dsm-x Ports
-SD card blackbox
-Baro(BMP280)
-5V 3A SBEC
-On-board Video Filter(only can supply 5V to VTX and Camera)
-SmartAudio V2 via tx6 on J10
-4×3 pin ESC pin layout
-IR pins for lap timing transponder