B-CUBE.RC - Build Your Drone From here- Build Your Drone From here!
B-CUBE PIXHAWK 6C PRO Flight Control M8N Carbon Fiber 450 Frame Kit Ardupilot 100MW Radio Telemetry Quadcopter BLHELI 30A 2212 Motor ESC
B-CUBE PIXHAWK 6C PRO Flight Control M8N Carbon Fiber 450 Frame Kit Ardupilot 100MW Radio Telemetry Quadcopter BLHELI 30A 2212 Motor ESC
Verfügbarkeit für Abholungen konnte nicht geladen werden
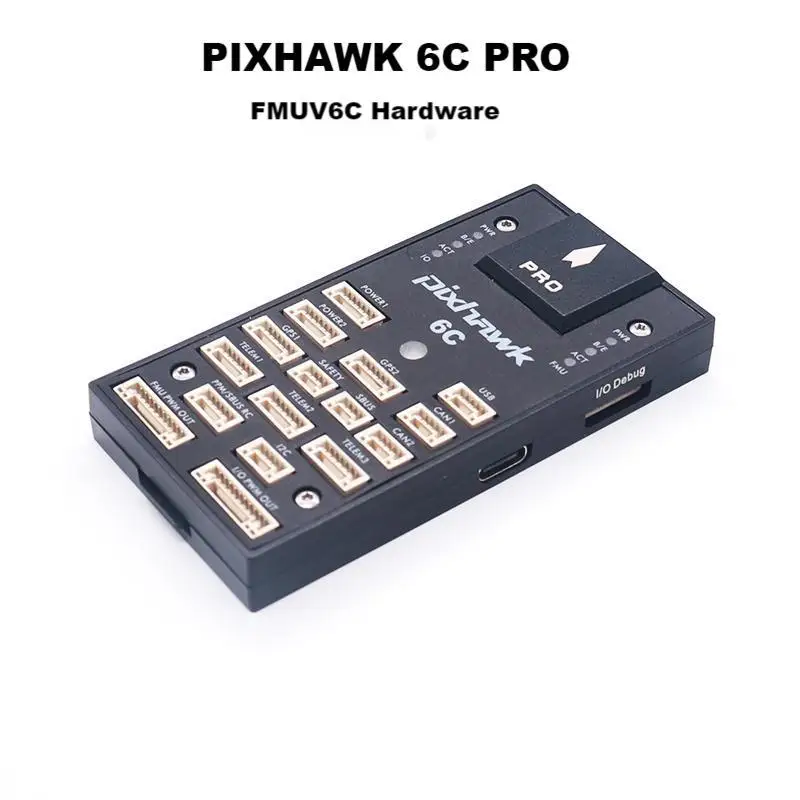
PIXHAWK 6C PRO
The Pixhawk® 6C PRO is the latest update to the successful family of Pixhawk® flight controllers, based on the Pixhawk® FMUv6C Open Standard and Connector Standard. It comes with PX4 Autopilot® pre-installed. STMicroelectronics® based STM32H743, paired with sensor technology from Bosch® & InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle, suitable for both academic and commercial applications.
The Pixhawk® 6C PRO's H7 microcontroller contain the Arm® Cortex®-M7 core running up to 480 MHz, has 2MB flash memory and 1MB RAM. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models.
The Pixhawk 6C PRO includes high-performance, low-noise IMUs on board, designed to be cost effective while having IMU redundancy. A vibration isolation System to filter out high-frequency vibration and reduce noise to ensure accurate readings, allowing vehicles to reach better overall flight performances.
The Pixhawk® 6C PRO is perfect for developers at corporate research labs, startups, academics (research, professors, students), and commercial application.
Key Design Points
- High performance STM32H743 Processor with more computing power & RAM
- Build-in Buzzer,Build-in RGB LED,support Independent external Safety Button,With Plastic Case
- New cost-effective design with low-profile form factor
- Newly designed integrated vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings
- IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
Technical Specification
Processors & Sensors
- FMU Processor: STM32H743 32 Bit Arm® Cortex®-M7, 480MHz, 2MB memory, 1MB SRAM
- IO Processor: STM32F103 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
- On-board sensors
- Accel/Gyro: ICM-42688-P
- Accel/Gyro: BMI055
- Mag: IST8310
- Barometer: MS5611
- Electrical data
- Voltage Ratings:
- Max input voltage: 6V
- USB Power Input: 4.75~5.25V
- Servo Rail Input: 0~36V
- Current Ratings:
- TELEM1 Max output current limiter: 1.5A
- All other port combined output current limiter: 1.5A
- Mechanical data
- Dimensions: 85 * 45 * 10 mm
- Weight (Plastic Case) : 33g
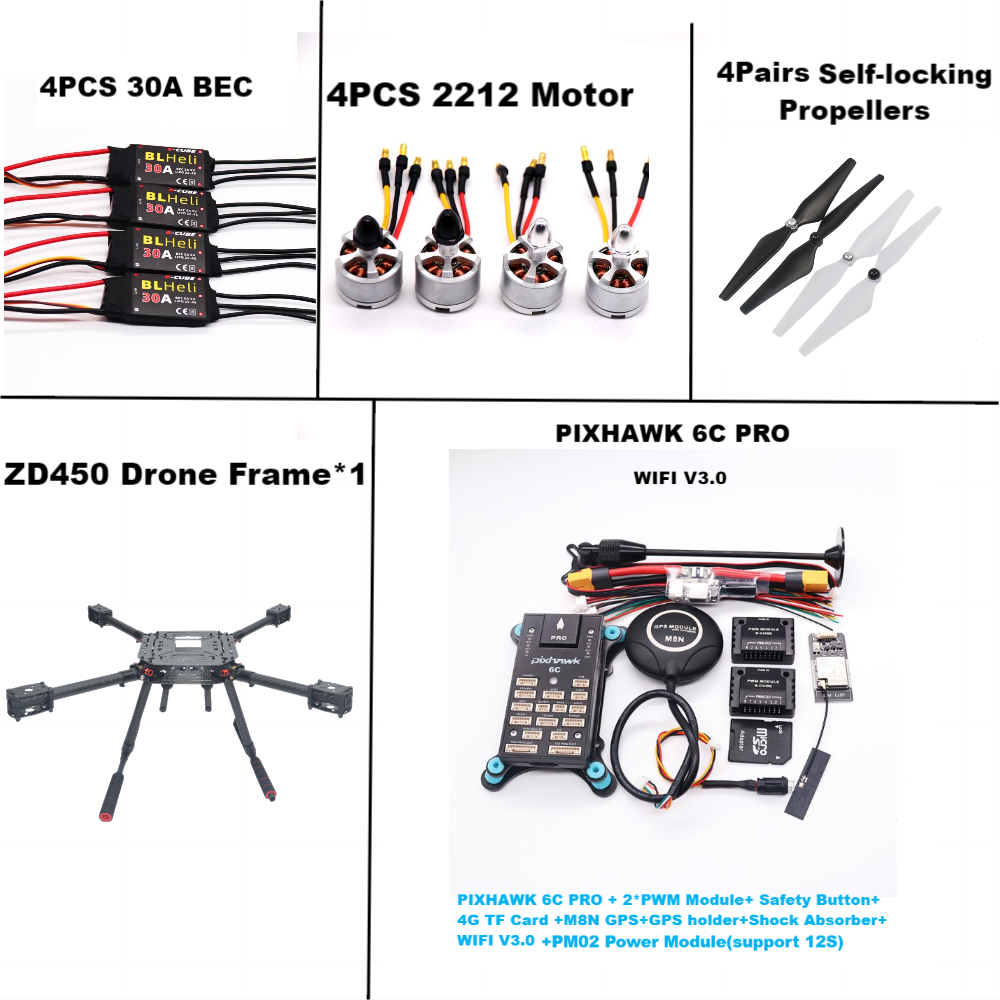
Simple package:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motor+
PIXHAWK 6C PRO +M8N GPS+3DR Power Module+ GPS Holde + Shock Absorber+ Safety Button And 2*PWM 4G TF CARD+3Line(4PGH1.25,6PGH1.25,2.54Pin)
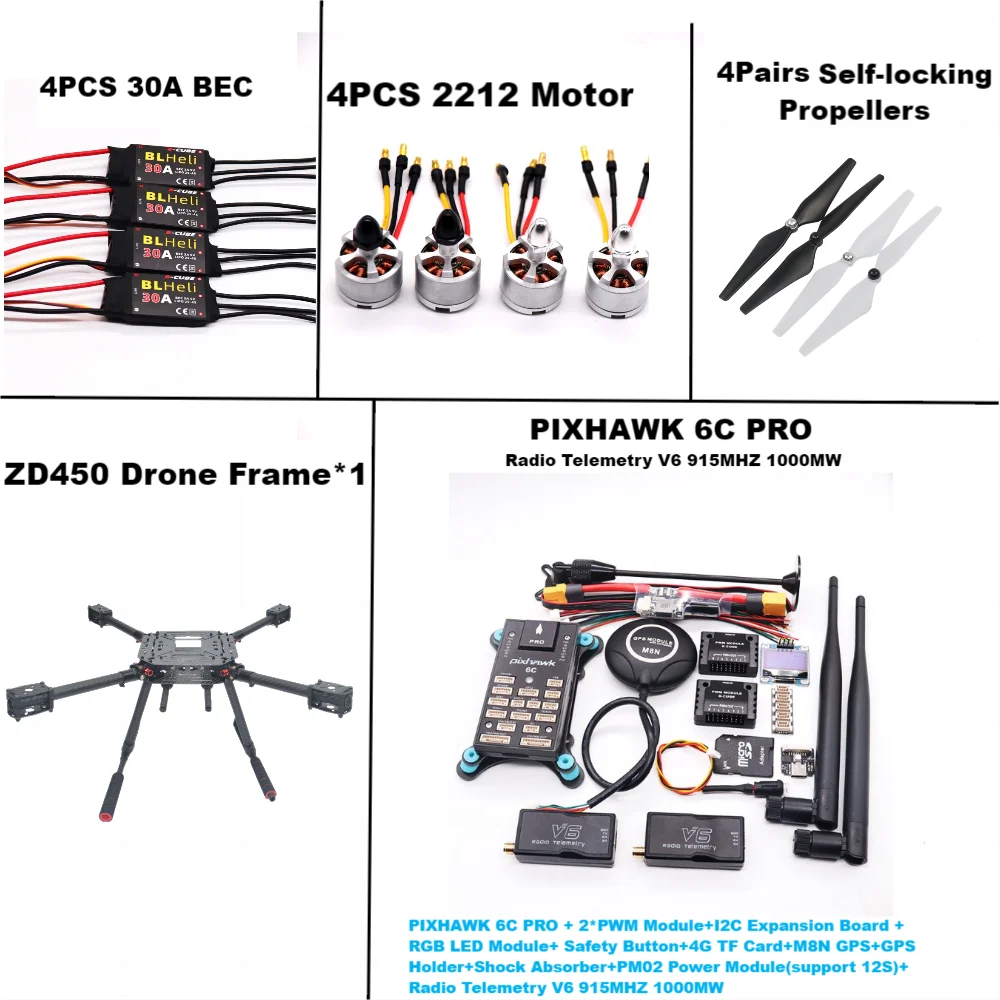
High package:
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motor+
PIXHAWK 6C PRO+2*PPM+I2C+RGB LED+OLED+M8N GPS+3DR Power Module+ GPS Holder+ Shock Absorber+4G TF CAR+Safety Button+3Line(4PGH1.25,6PGH1.25,2.54Pin)
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motor+
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motor+
F450+4 PCS BLHELI 30A +4 pairs 1045 Propellers +4 PCS 2212 920KV motor+

M8N GPS:


Frame 450:



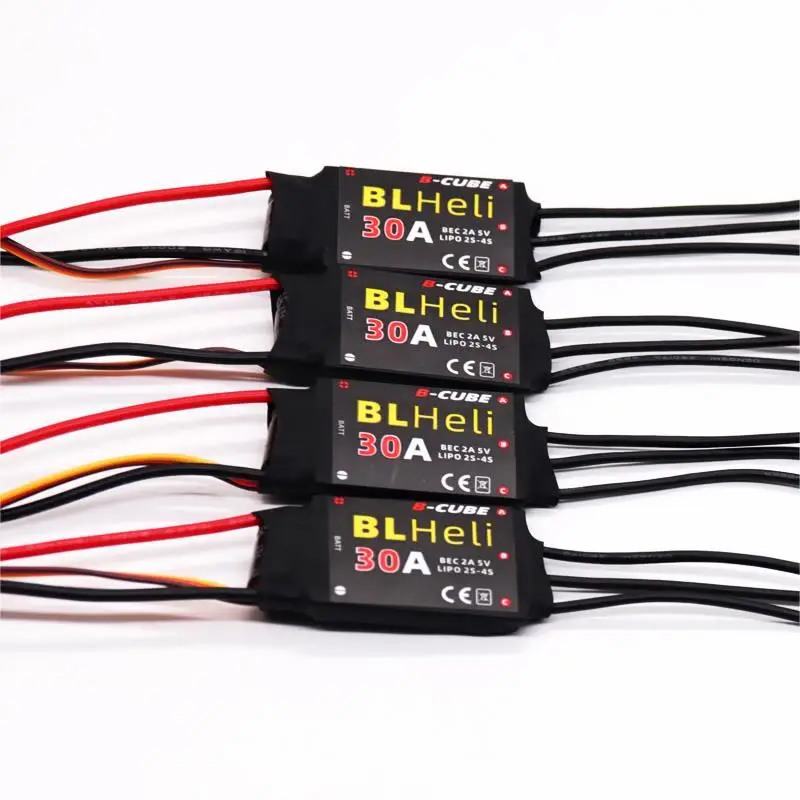
 BLHELI ESC:
BLHELI ESC:
A.Features
A1: Use authentic electronic components to ensure high quality and enhance the current endurance ability of the ESC.
A2: Based on BLHeli firmware, optimized for high performance with great linearity and much quicker throttle response.
A3: Special designed for multirotors, and compatible with fixed-wing aircrafts and helicopters.
A4: Multiple protection features including Low-voltage cut-off protection / over-heat protection / throttle signal loss protection.
A5: Throttle range can be configured and is fully compatible with all receivers, providing smooth, linear and precise throttle response. A6: All parameters can be programmed via using a transmitter, including default settings.
B. Productspecification 
2212 920KV Motor

1045 Propellers

Radio telemetry can be used for wireless communication between pixhawk and computer or mobile phone.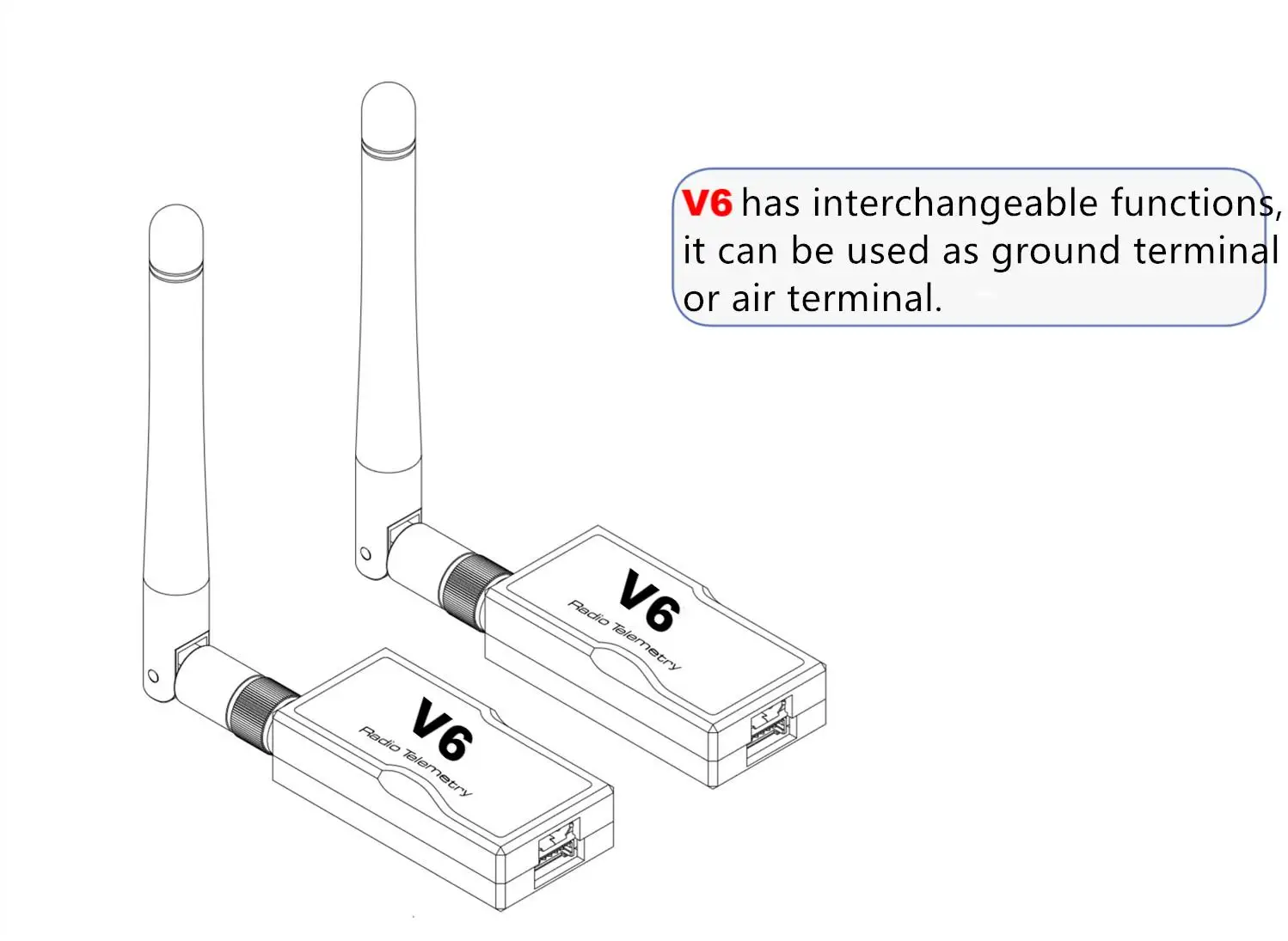
 OLED Module can display some message.
OLED Module can display some message.

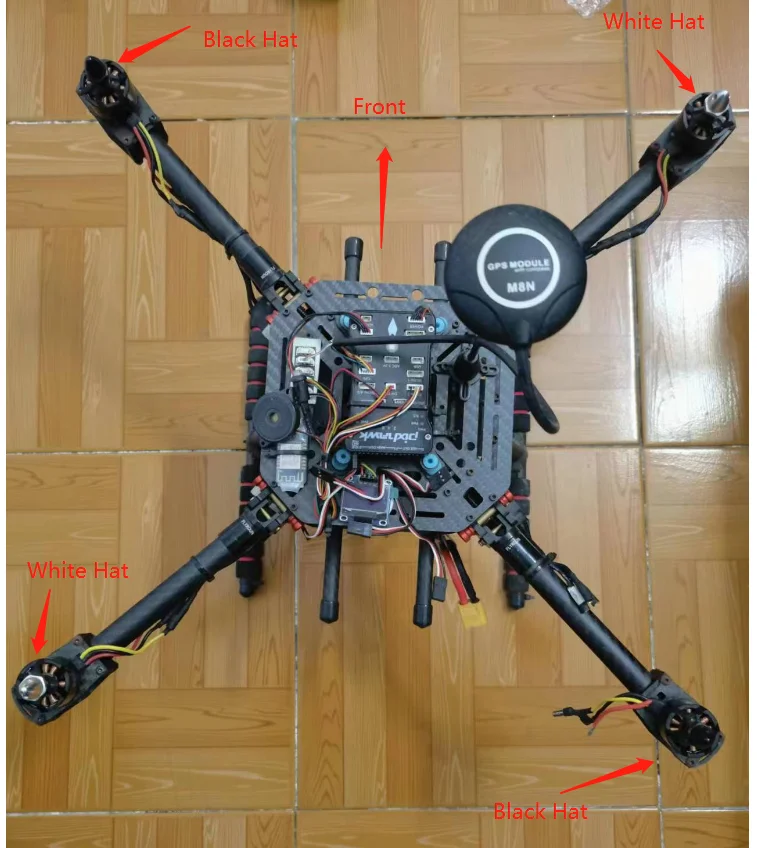
This article explains how to connect the ESCs, motors and propellers to a autopilot. The Pixhawk is used as an example but other autopilots are connected in a similar way.
Connect the power (+), ground (-), and signal (s) wires for each ESC to the autopilots main output pins by motor number. Find your frame type below to determine the assigned order of the motors.
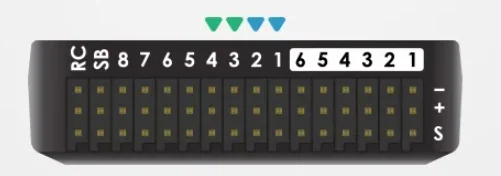
Pixhawk Outputpins (numbered). First 4 pins are colour-coded for connecting a Quadframe
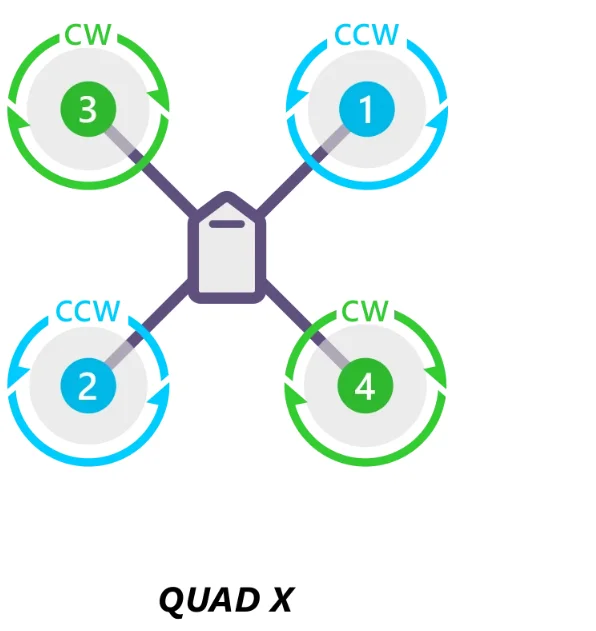
Motor order diagrams
The diagrams below show motor order for each frame type. The numbers indicate which output pin from the autopilot shoould be connected to each motor/propeller. The propeller direction is shown in green (clockwise, CW) or blue (counter-clockwise, CCW)
Legend for motor-order diagrams
Quadcopter
Recognizing clockwise and counterclockwise propellers
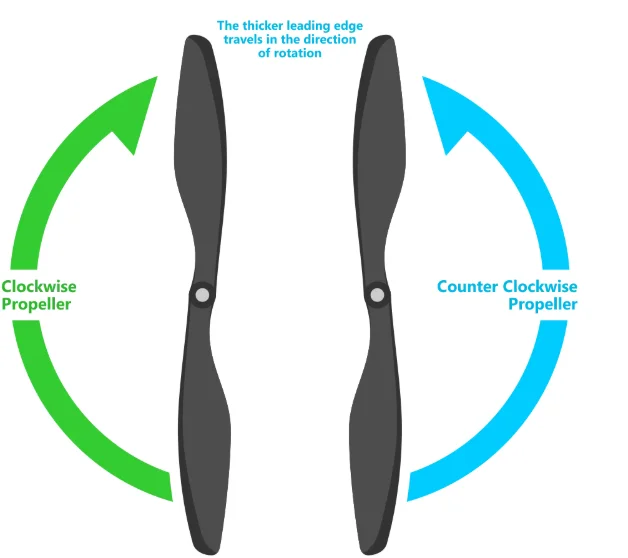
The diagrams above show two types of propellers: clockwise (called pushers) and counterclockwise (called pullers). The most reliable to recognize the correct propeller type by its shape as shown below. The thicker edge is the leading edge which moves in the direction of rotation. The trailing edge is more radical scalloped and usually thinner.
How to install Motor?